Kuinka peruuttaa tasa- ja vaihtovirta sähkömoottori
Peruutusmoottorit
Helpoin tapa on kääntää tasavirtamoottori, jossa on staattori, jolla on kestomagneetit. Riittää, kun muutat virtalähteen napaisuutta, jotta roottori alkaa pyöriä vastakkaiseen suuntaan.
Moottoria on vaikeampaa peruuttaa sähkömagneettisella virityksellä (sarja, rinnakkain). Jos muutat vain syöttöjännitteen napaisuutta, roottorin pyörimissuunta ei muutu. Pyörimissuunnan muuttamiseksi riittää, että napaisuus muuttuu vain kenttäkäämityksessä tai vain roottoriharjoissa.
Suurtehoisten moottorien kääntämiseksi napaisuutta tulisi muuttaa ankkurissa. Käynnissä olevan moottorin käämityksen murtuminen voi aiheuttaa toimintahäiriön, koska tuloksena olevassa EMF: ssä on lisääntynyt jännite, mikä voi vahingoittaa käämien eristystä. Mikä johtaa sähkömoottorin vikaantumiseen.
Roottorin käänteisen pyörimissuunnan toteuttamiseksi käytetään relepiireissä, kontaktoreissa tai transistoreissa siltapiirejä. Jälkimmäisessä tapauksessa on mahdollista säätää pyörimisnopeutta.

Kuvio esittää transistoripiiriä. Havainnollistamiseksi transistorit korvataan kytkinkoskettimilla. Samoin siltapiirejä ei suoriteta bipolaarisille, vaan kenttävaikutteisille transistoreille.

Tällaisen piirin hyötysuhde on paljon korkeampi kuin transistoreilla. Ohjaus tapahtuu mikro-ohjaimella tai yksinkertaisilla logiikkapiireillä, jotka estävät signaalien samanaikaisen syöttämisen.
Induktorimoottorin roottorin pyörimissuunnan muuttaminen
Levinnein teollisuudessa induktiomoottoritpowered by kolmivaiheinen jännite 380 volttia. Käännä vain vaihtamalla kaksi vaihetta.
Kaksi magneettista käynnistintä varten tehty kytkentäkaavio sai jakelun. Oikeastaan DC-moottoreissa se on samanlainen, mutta kaksinapainen kontaktorit tai käynnistimet. Tätä virtapiiriä kutsutaan ”peruutuskäynnistyspiiriksi” tai “asynkronisen kolmivaiheisen sähkömoottorin peruutuskäynnistyspiiriksi”.

Kun KM1-käynnistin kytketään päälle “Käynnistä 1” -painikkeella, jännite johdetaan suoraan käämityksiin ja “Käynnistä 2” -painike estyy vahingossa käynnistymästä avaamalla KM-1: n normaalisti suljetut koskettimet. Moottori pyörii yhteen suuntaan.
Kun irrotat KM1-käynnistimen Stop-painikkeella tai poistamalla jännitteen kokonaan, KM2 voidaan kytkeä päälle Start 2 -painikkeella. Seurauksena on, että kontaktien kautta L2-linja syötetään suoraan, ja L1 ja L3 vaihdetaan. “Käynnistä 1” -painike on lukittu, koska KM2-käynnistimen normaalisti suljetut koskettimet ajetaan ja avataan. Moottori alkaa pyöriä toiseen suuntaan.
Järjestelmää käytetään kaikkialla tähän päivään asti kolmivaihemoottorin kytkemiseksi kolmivaiheverkkoon. Piiriratkaisun yksinkertaisuus ja komponenttien saatavuus ovat sen merkittäviä etuja.
Yleisimmät ovat elektroniset ohjausjärjestelmät. Kytkentäpiirit, jotka on koottu tyristoreihin ilman käynnistimiä. Vaikka käynnistimet voidaan asentaa kytkeäksesi etäyhteyden päälle tai pois päältä tässä piirissä.

Ne ovat monimutkaisempia, mutta myös luotettavampia kuin kontaktoreissa olevat laitteet. Ohjaukseen käytetään pulssivaiheohjausjärjestelmiä (SIFU), taajuudenohjausjärjestelmiä. Nämä ovat monitoimilaitteita, joiden avulla on mahdollista paitsi palauttaa asynkroninen sähkömoottori myös säätää pyörimistaajuutta.
Kotona on tarpeen kytkeä 380 V: n ja 220: n moottori taaksepäin. Tätä varten sinun on vaihdettava tähtikolmion käämit. Tarkemmin tutkimme näiden järjestelmien eroja artikkelissa, joka julkaistiin aiemmin sivustolle: https://electro.tomathouse.com/fi/chto-takoe-zvezda-i-treugolnik-v-elektrodvigatele.html.
Kuitenkin, jos aiotaan kolmivaiheisen sähkömoottorin kytkentä yksivaiheiseen verkkoon, siihen käytetään kondensaattoria, joka on kytketty alla olevan kaavion mukaisesti.
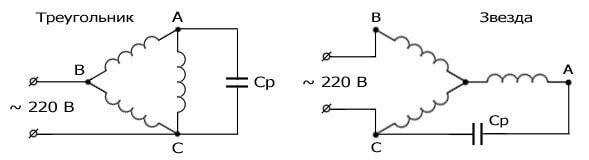
Tässä tapauksessa taaksepäin suuntautumiseksi riittää vaihtamaan verkkojohto B: stä liittimeen A, irrottamaan kondensaattori A: sta ja yhdistämään liittimeen B. Tämä on kätevää tehdä 6-napaisella kytkinkytkimellä. Tämä on tyypillinen induktiomoottorin sisällyttäminen 220 V verkkoon kondensaattorilla.
Kytkentäkaavio käännettävälle kommuttorimoottorille
Kääntäjän moottorin peruuttamiseksi sinun on tiedettävä:
- Ei kaikissa kollektorimoottori voi kääntää. Jos kääntönuoli on merkitty koteloon, sitä ei voida käyttää peruutuslaitteissa.
- Kaikki suurella kierroksella varustetut moottorit on suunniteltu pyörimään yhteen suuntaan. Esimerkiksi hiomakoneisiin asennettu sähkömoottori.
- Moottorissa, jolla on alhaiset kierrokset, kierto voidaan suorittaa eri suuntiin. Tällaiset moottorit asennetaan sähkötyökaluihin, esimerkiksi sähköporakkeisiin, ruuvimeisseliin, pesukoneisiin jne.
Kuvassa on kaavio universaalisesta kommuttorimoottorista, joka voi toimia sekä tasa- että vaihtovirralla.

Roottorin pyörimisen muuttamiseksi riittää, kun vaihdetaan käämin poikkileikkauksen jännitettä roottori tai staattori, kuten tasavirtamoottoreissa, joista yleiskoneet eivät käytännössä eroa toisistaan.
Jos muutat vain kollektorimoottorin syöttöjännitteen napaisuutta, roottorin pyörimissuunta ei muutu. Tämä on otettava huomioon kytkettäessä sähkömoottori verkkoon.
Sinun pitäisi myös tietää, että suuritehoisissa moottoreissa ankkurikäämi liikkuu. Kun staattorikäämiä vaihdetaan, jännite tulee näkyviin itseinduktanssin, joka saavuttaa arvot, jotka voivat estää moottorin.
Amatöörisuunnittelijat käyttävät käsityössään erilaisia moottorityypit. Usein he käyttävät pesukoneen harjamoottoria.Nämä ovat käteviä moottoreita, jotka voidaan kytkeä suoraan 220 voltin verkkoon. Ne eivät vaadi ylimääräisiä kondensaattoreita, ja nopeuden säätö voidaan tehdä helposti tavallisella himmentimellä. Kuusi tai seitsemän nastaa viedään liittimeen.
Riippuu moottorityypistä:
- Kaksi menee keräysharjoihin.
- Pari johtoa tulee kierroslukumittarista lohkoon.
- Kenttäkäämityksissä voi olla kaksi tai kolme lankaa. Kolmas tarkoitus on muuttaa pyörimisnopeutta.

Moottorin kääntämiseksi pesukoneesta on tarpeen vaihtaa kenttäkäämin ulostulot. Jos on olemassa kolmas johtopäätös, sitä ei käytetä.
Arduino-sähkömoottorin kääntöpiiri
Mallien tai robotiikan suunnittelussa käytetään usein pieniä DC-harjamoottoreita, joita ohjataan ohjelmoitavalla arduino-mikro-ohjaimella.
Jos moottorin pyöriminen oletetaan vain yhteen suuntaan ja sähkömoottorin teho on pieni ja syöttöjännite on 3,3 - 5 volttia, niin virtapiiriä voidaan yksinkertaistaa ja syöttää suoraan arduinosta, mutta tämä tehdään harvoin.
Kauko-ohjattavissa malleissa, joissa on välttämätöntä käyttää yli 5 V: n jännitteisiä käänteismoottoreita, käytä siltapiirin mukaan koottuja avaimia. Tässä tapauksessa moottorin kytkentäkaavio päinvastaiseen suuntaan arduinoon näyttää samanlaiselta kuin alla on esitetty. Tätä sisällyttämistä käytetään useimmiten.

Siltapiirissä voidaan käyttää kenttäteho-transistoreita tai erityistä sovituslaitetta - ohjainta, johon tehokkaat moottorit on kytketty.
Lopuksi huomaamme, että koulutetun asiantuntijan on koottava sähkömoottorin peruutuspiiri. Itse kytkettäessä on kuitenkin noudatettava turvallisuusolosuhteita, valittava sopiva kytkentäkaavio ja tarvittavat lisävarusteet noudattaen tiukasti asennusohjeita. Tässä tapauksessa suunnittelijalla ei ole vaikeuksia kytkeä ja käyttää sähkömoottoria.
Nyt tiedät mikä on sähkömoottorin kääntöpuoli ja mitä kytkentämalleja siihen käytetään. Toivomme annettujen tietojen olevan hyödyllisiä ja mielenkiintoisia sinulle!
Aiheeseen liittyvät materiaalit: