Mikä on induktiomoottori ja miten se toimii
Induktiomoottori on yksinkertainen ja luotettava, ja siksi sitä käytetään hyvin usein tuotannossa ja kodinkoneissa venttiilin käytöstä pesukoneen rummun pyörimiseen. Tässä artikkelissa kerromme sinulle yksinkertaisin sanoin mitä asynkroniset sähkömoottorit ovat, mikä se on ja kuinka tämäntyyppiset sähkökoneet toimivat.
tyypit
Induktorimoottorit (AM) on jaettu kahteen pääryhmään:
- oravakori roottori
- vaiheroottorilla.
Jos jättämme vivahteet pois, ero on siinä, että oravakoriroottorimoottorissa ei ole harjoja ja selkeitä käämejä, se on vähemmän vaativa kunnossapidossa. Vaiheroottorilla varustetuissa asynkronisissa moottoreissa liukurenkaisiin on kytketty kolme käämiä, joista virta poistetaan harjoilla. Toisin kuin edellisessä, on parempi hallita akselin vääntömomenttia ja on helpompi toteuttaa tasainen käynnistys tunkeutumisvirtojen vähentämiseksi.
Muut moottorit luokitellaan:
- syöttövaiheiden lukumäärän mukaan - yksivaiheinen ja kaksivaiheinen (käytetään jokapäiväisessä elämässä, kun sähkö saa 220V verkkoa) ja kolmivaiheinen (käytetään eniten tuotannossa ja työpajoissa).
- kiinnityksellä - laippa tai tassut.
- käyttötavalla - pitkä, lyhytaikainen tai toistuvasti lyhytaikainen tila.
Ja joukko muita tekijöitä, jotka vaikuttavat tietyn tuotteen valintaan käytettäväksi tietyissä olosuhteissa.
Yksivaiheisista sähkömoottoreista voidaan sanoa paljon: osa niistä käynnistetään kondensaattorin kautta, ja jotkut vaativat käynnistys- ja työkapasiteetin. On myös vaihtoehtoja, joissa on oikosulkusuunta, jotka toimivat ilman kondensaattoria ja joita käytetään esimerkiksi kupuissa. Jos olet kiinnostunut, kirjoita kommentit ja me kirjoitamme siitä artikkelin.
laite
Määritelmän mukaan 'asynkroninen' tarkoittaa vaihtovirtamoottoria, jossa roottori pyörii hitaammin kuin staattorin magneettikenttä, eli asynkronisesti. Mutta tämä määritelmä ei ole liian informatiivinen. Ymmärtääksesi se, sinun täytyy selvittää, kuinka tämä moottori on suunniteltu.
Induktiomoottori, kuten mikä tahansa muu, koostuu kahdesta pääosasta - roottori ja staattori. Elektroniikan "nukkeille" purkamme:
- Staattoria kutsutaan minkä tahansa generaattorin tai sähkömoottorin kiinteäksi osaksi.
- Roottori on moottorin pyörivä osa, joka käyttää mekanismeja.

Staattori koostuu kotelosta, jonka päät suljetaan laakerisuojailla, joihin laakerit on asennettu. Moottorin tarkoituksesta ja tehosta riippuen käytetään liuku- tai vierintälaakereita. Ydin sijaitsee kotelossa, siihen on asennettu käämi. Sitä kutsutaan staattorikäämitykseksi.

Koska virta vaihtuu hajavirtojen aiheuttamien häviöiden vähentämiseksi (Foucault-virtaukset) staattorin ydin on vedetty ohuista teräslevyistä, jotka on eristetty toisistaan mittakaavassa ja sidottu lakalla.Staattorikäämitykseen syötetään syöttöjännite, niissä virtaavaa virtaa kutsutaan staattorivirraksi.
Käämien lukumäärä riippuu syöttövaiheiden määrästä ja moottorin suunnittelusta. Joten kolmivaiheisessa moottorissa on ainakin kolme käämiä, jotka on kytketty tähti- tai kolmiopiirillä. Niiden lukumäärä voi olla suurempi, ja se vaikuttaa akselin pyörimisnopeuteen, mutta puhumme tästä myöhemmin.
Mutta roottorin kanssa asiat ovat mielenkiintoisempia, kuten jo mainittiin, se voi olla joko oikosulku tai vaihe.

Oravakoriroottori on joukko metallitankoja (yleensä alumiinia tai kuparia), yllä olevassa kuvassa ne on merkitty numerolla 2, juotettu tai täytetty ytimeen (1), suljettu renkailla (3). Tämä malli muistuttaa pyörää, jossa kodittuneet jyrsijät juoksevat, minkä vuoksi sitä kutsutaan usein ”oravakoriksi” tai “oravanpyöräksi” eikä tämä nimi ole slängi, vaan melko kirjallinen. EMF: n korkeampien harmonisten ja magneettikentän pulsaation vähentämiseksi tankoja ei sijoiteta akselia pitkin, vaan tietyssä kulmassa pyörimisakseliin nähden.
Vaiheroottori eroaa edellisestä siinä, että siinä on jo kolme käämiä, kuten staattorissa. Käämien alku on kytketty renkaisiin, yleensä kupariin, ne puristetaan moottorin akselille. Myöhemmin selitämme lyhyesti, miksi niitä tarvitaan.

Molemmissa tapauksissa yksi akselin päistä on liitetty mekanismiin, jota liikuttaa, se on kartiomainen tai lieriömäinen muodoltaan urilla tai ilman uria laipan, hihnapyörän ja muiden mekaanisten käyttöosien asentamiseksi.
Akselin “takaosaan” on kiinnitetty puhallukseen ja jäähdytykseen tarvittava juoksupyörä; koteloon on asetettu kotelo juoksupyörän päälle. Siten kylmä ilma ohjataan induktiomoottorin reunoja pitkin, jos tämä juoksupyörä ei pyöri jostain syystä, se ylikuumenee.

Ensimmäisen induktiomoottorin suunnittelun on kehittänyt M.O. Dolivo-Dobrovolsky ja hän patentoi sen vuonna 1889. Ilman muutoksia, se on säilynyt nykyään.
Toimintaperiaate
Asynkronisia sähkökoneita kutsutaan usein induktioiksi, mikä johtuu niiden toimintaperiaatteesta. Mikä tahansa sähkömoottori pyörii roottorin ja staattorin magneettikentien vuorovaikutuksen seurauksena, samoin kuin Ampere-voimasta. Magneettikenttä puolestaan voi esiintyä joko kestomagneetin ympärillä tai johtimen ympärillä, jonka läpi virta kulkee. Mutta kuinka asynkroninen kone oikein toimii?
Induktorimoottorissa, toisin kuin muut, ei ole virityskäämiä sinänsä, kun taas siinä on magneettikenttä? Vastaus on yksinkertainen: induktiomoottori on muuntaja.
Mieti sen toimintaperiaatetta kolmivaiheisen koneen esimerkissä, koska juuri niitä löytyy useammin kuin toisia.
Alla olevassa kuvassa näet käämien sijainnin kolmivaiheisen asynkronisen moottorin staattorin ytimessä.

Kolmivaiheisen virran virtauksen seurauksena staattorin käämiin ilmestyy pyörivä magneettikenttä. Vaiheensiirron takia virta virtaa joko toiseen tai toiseen käämiin, tämän mukaisesti on magneettikenttä, jonka navat on suunnattu oikean käden säännön mukaan. Ja yhden tai toisen käämin virranmuutoksen mukaisesti navat lähetetään vastaavaan suuntaan. Kuten seuraava animaatio kuvaa:

Yksinkertaisimmassa (kaksinapaisessa) tapauksessa käämit pinotaan siten, että kukin niistä on 120 astetta siirtynyt edelliseen nähden, kuten vaihtojännitteen jännitteen vaihekulma.
Staattorin magneettikentän pyörimisnopeutta kutsutaan synkroniseksi. Lisätietoja siitä, kuinka se pyörii ja miksi opit seuraavasta videosta. Huomaa, että kaksivaiheisissa (kondensaattori-) ja yksivaiheisissa moottoreissa - se ei ole pyörivä, vaan elliptinen tai sykkivä, ja käämit eivät ole 3, vaan 2.
Jos tarkastellaan asynkronista sähkömoottoria, jossa on oravakoriroottori, staattorin magneettikenttä indusoi EMF: n sauvoissaan, koska ne ovat kiinni, niin virta virtaa.Tämän vuoksi esiintyy myös magneettikenttä.
Kahden kentän ja Ampere voimaRoottoriin vaikuttaen se alkaa pyöriä staattorin pyörivän magneettikentän jälkeen, mutta se on aina hiukan taaksepäin staattorin MP pyörimisnopeudesta, tätä viivettä kutsutaan liukumiseksi.
Jos magneettikentän pyörimisnopeutta kutsutaan synkroniseksi, roottorin pyörimisnopeus on jo asynkroninen, mistä hän sai tämän nimen.
Vaiheroottorilla varustetun AD: n tapauksessa asiat ovat samankaltaiset, paitsi että renkaisiin on kytketty reostaatti, joka moottorin siirtyessä toimintatilaan poistetaan piiristä ja käämit oikosuljetaan. Tämä on esitetty alla olevassa kaaviossa, mutta reostaatin sijasta käytetään vakiovastuksia, liitetään tai siirretään kontaktoreilla KM3, KM2, KM1.
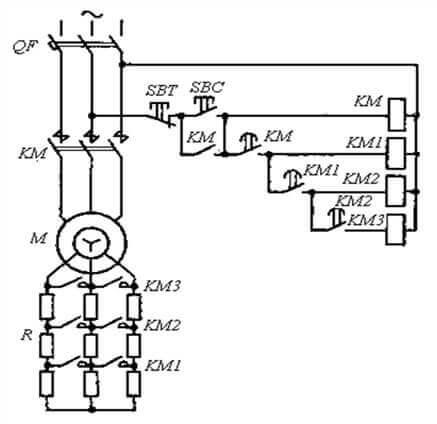
Tämä lähestymistapa mahdollistaa tasaisen käynnistymisen ja vähentää tunkeutumisvirtoja lisäämällä roottorin aktiivista sähkövastusta.
 Yhteenvetona:
Yhteenvetona:
- Staattorikäämityksissä oleva virta synnyttää magneettikentän.
- Magneettikenttä johtaa roottorin virtaan.
- Roottorin virta johtaa kentän ilmestymiseen sen ympärille.
- Koska staattorikenttä pyörii kentänsä takia, roottori alkaa pyöriä sen takana.
Liukumis- ja pyörimisnopeus
Staattorin magneettikentän (n1) pyörimistaajuus on suurempi kuin roottorin (n2) pyörimistaajuus. Niiden välistä eroa kutsutaan slip: ksi, ja sitä merkitään latinalaisella kirjaimella S ja lasketaan kaavalla:
S = (n1-n2) * 100% / n1
Liukuminen ei ole tämän sähkömoottorin haitta, koska jos sen akseli pyörii samalla taajuudella kuin staattorin magneettikenttä (synkronisesti), niin tankoihin ei indusoitu virtaa eikä se yksinkertaisesti pyöri.
Nyt tärkeämmästä käsitteestä - induktiomoottorin roottorin pyörimisnopeudesta. Se riippuu 3 arvosta:
- syöttöjännitteen taajuus (f);
- magneettinauvojen parien lukumäärä (p);
- liukua (S).
Magneettinapojen parien lukumäärä määrää kentän pyörimisnopeuden synkronisesti ja riippuu staattorin käämien lukumäärästä. Liukuminen riippuu tietyn sähkömoottorin kuormituksesta ja suunnittelusta ja on alueella 3-10%, ts. Asynkroninen nopeus on hyvin vähän vähemmän kuin synkroninen. No, vaihtovirran taajuus on kiinteä 50 Hz.
Siksi induktiomoottorin akselin pyörimisnopeutta on vaikea säätää, voit vaikuttaa vain verkon taajuuteen, ts. taajuusmuuttaja. Staattorin jännitettä on mahdollista alentaa, mutta silloin akselin teho pienenee, silti tällaista tekniikkaa käytetään käynnistettäessä AM vaihtamalla käämitys tähdestä deltaan käynnistysvirtojen vähentämiseksi.
Staattorikentän pyörimistaajuus (synkroninen nopeus) määritetään kaavalla:
n = 60 * f / p
Joten moottorissa, jossa on yksi pari magneettista napaa (kaksi napaa), synkroninen nopeus on:
60 * 50/1 = 3000 rpm
Yleisimmät vaihtoehdot sähkömoottoreille:
- yksi napojen pari (3000 rpm);
- kaksi (1500 rpm);
- kolme (1 000 rpm);
- neljä (750 rpm).
Roottorin todellinen nopeus on hiukan pienempi, todellisella induktiomoottorilla se ilmoitetaan esimerkiksi tyyppikilvessä, tässä - 2730 rpm. Siitä huolimatta ihmiset kutsuvat sellaista asynkronista moottoria synkronisen nopeuden tai yksinkertaisesti ”kolmetuhatta metriä” mukaan.

Silloin sen liukuminen on yhtä suuri:
3000-2730*100%/3000=9%
Soveltamisala
Asynkroninen sähkömoottori on löytänyt sovelluksen kaikilla ihmisen toiminnan aloilla. Yhdestä vaiheesta (220 V) saavat virrat löytyvät pienitehoisista toimilaitteista tai kotitalouslaitteista ja työkaluista, esimerkiksi:
- "vauva" -tyyppisessä pesukoneessa ja muissa vanhoissa Neuvostoliiton malleissa;
- betonimyllyssä;
- tuulettimessa;
- hupussa;
- ja jopa ylemmän hintasegmentin ruohonleikkureilla.



Tuotannossa kolmivaiheisissa verkoissa:
- automaattiset venttiilit;
- nostolaitteet (nosturit ja vinssit);
- ilmanvaihto;
- kompressorit;
- pumput;
- puun ja metallin työstökoneet ja paljon muuta.




AD: tä käytetään myös sähköajoneuvoissa, ja viime aikoina asynkronista moottoria, jolla on Slavyanka-tyyppinen käämi, ja niin kutsuttua Duyunov-moottoripyörää mainostetaan aktiivisesti Internetissä, jonka voit selvittää kehittäjän videosta.
Asynkronisten moottoreiden laajuus on niin laaja, että luettelo yksinään on pidempi kuin tämä artikkeli, joten jokaisen sähköasentajan tulisi tietää, miten se toimii, mihin se on tarkoitettu ja missä sitä käytetään. Yhteenveto ja luettelo näiden laitteiden eduista ja haitoista.
Plussat:
- Yksinkertainen rakenne.
- Edullinen
- Melkein ei huoltoa.
Suurin haittapuoli on vaikeus nopeuden säätämisessä verrattuna samoihin tasavirtamoottoreihin tai yleiskollektorikoneisiin. Siksi suurten koneiden sujuvan käynnistymisen järjestäminen on vaikeaa, ja tämä tapahtuu useammin kallista taajuusmuuttajaa käyttämällä.
Tässä päädymme induktiomoottoreiden ja niiden laajuuden tarkasteluun. Toivomme, että luettuasi artikkelin ymmärrät mitä se on ja kuinka tämä sähkökone toimii!
Aiheeseen liittyvät materiaalit:




