Hvad er en synkronmotor, og hvor bruges den
Synkroniske elektriske motorer (SD) er ikke så almindelige som asynkrone egernsmotorer. Men de bruges, hvor der er behov for et stort drejningsmoment og ofte under arbejdet overbelaste. Denne type motor bruges også, hvor der er behov for stor magt til at drive mekanismerne på grund af den høje effektfaktor og evnen til at forbedre netværkets effektfaktor, hvilket vil reducere omkostningerne til elektricitet og belastning på linjen markant. Hvad er en synkronmotor, hvor bruges den, og hvad er dens fordele og ulemper vil vi overveje i denne artikel.
Definition og handlingsprincip
Enkelt sagt kaldes en synkronmotor en elektrisk motor, hvis rotor (aksel) rotationshastighed falder sammen med statorens magnetfeltes rotationshastighed.
Lad os kort overveje driftsprincippet for en sådan elektrisk motor - det er baseret på samspillet mellem det roterende statormagnetfelt, som normalt oprettes ved hjælp af trefas vekselstrøm og rotorens konstante magnetfelt.
Rotorets konstante magnetiske felt oprettes af magnetiseringsviklingen eller permanente magneter. Strømmen i statorviklingerne skaber et roterende magnetfelt, mens rotoren i driftstilstand er en permanent magnet, dens poler skynder sig mod de modsatte poler i statormagnetfeltet. Som et resultat roterer rotoren synkront med statorfeltet, som er dets hovedfunktion.
Husk det induktionsmotor stator MP rotationshastighed og rotor rotationshastighed adskiller sig med mængden af glid, og dens mekaniske egenskab "humpes" med en top under kritisk slip (under dens nominelle rotationshastighed).
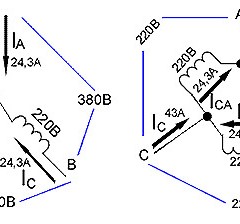
Den hastighed, som statormagnetfeltet roterer med, kan beregnes ved hjælp af følgende ligning:
N = 60f / p
f er frekvensen af strømmen i viklingen, Hz, p er antallet af polpar.
Følgelig bestemmes rotationshastigheden for den synkrone motoraksel af den samme formel.
De fleste AC-elektriske motorer, der bruges i produktionen, er fremstillet uden permanente magneter, men med en excitationsvikling, mens synkron AC-motorer med lav effekt er lavet med permanente magneter på rotoren.
Strømmen til feltviklingen leveres af ringe og en børsteenhed. I modsætning til en kollektorelektrisk motor, hvor en kollektor (et sæt af langsgående arrangerede plader) bruges til at overføre strøm til en roterende spole, er ringe monteret på den synkrone over den ene ende af statoren.
Thyristor-excitatorer, ofte kaldet "VTE" (ved navn en af serierne af sådanne enheder til indenlandsk produktion) er i øjeblikket kilden til jævnstrømcititation.Tidligere blev generator-motor-excitation-systemet brugt, da en generator blev installeret på samme aksel med motoren (det er også en exciter), som modstande påført strøm til feltvikling.
Rotoren for næsten alle synkrone DC-motorer udføres uden en excitationsvikling, og med permanente magneter, selvom de principielt ligner AC-LED'er, er de meget forskellige med hensyn til, hvordan de er tilsluttet og styret fra klassiske trefasede maskiner.
En af de vigtigste egenskaber ved en elektrisk motor er en mekanisk egenskab. Hun synkroniserer motorer tæt på en lige vandret linje. Dette betyder, at belastningen på akslen ikke påvirker dens hastighed (indtil den når en kritisk værdi).
 asynkrone og b) synkrone motorer")
Dette opnås netop på grund af jævnstrømscititation, hvorfor den synkrone elektriske motor perfekt holder konstante omdrejninger under skiftende belastninger, overbelastninger og spændingsfald (op til en vis grænse).
Nedenfor ser du symbolet på diagrammet af den synkrone maskine.

Rotordesign
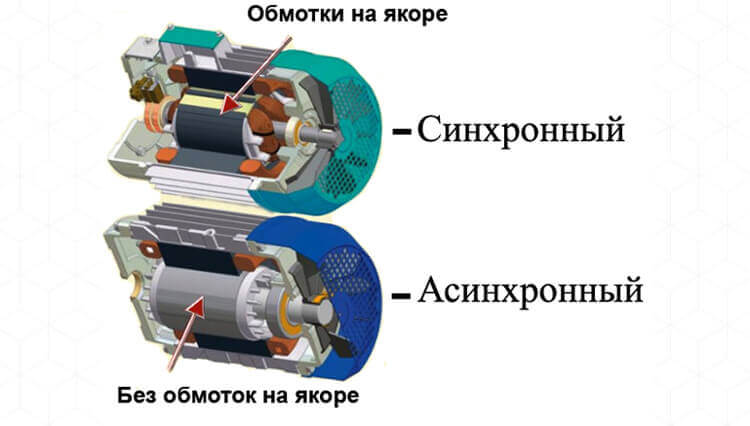
Som enhver anden består en synkron elektrisk motor af to hoveddele:
- Stator. Viklingerne er placeret i det. Det kaldes også et anker.
- Rotor. Permanente magneter eller en excitationsvikling er installeret på den. Det kaldes også en induktor på grund af dens formål - at skabe et magnetfelt).
For at levere strøm til feltviklingen installeres 2 ringe på rotoren (da excitationen er jævnstrøm, "+" leveres til den ene af dem, og "-" til den anden). Børster er fastgjort til børsteholderen.

Rotorerne for synkron AC-motorer er af to typer, afhængigt af formålet:
- Eksplicit polær. Polakker (spoler) er tydeligt synlige. Brug ved lave hastigheder og et stort antal poler.
- Implicit - det ser ud som et rundt tomt, i det spor, hvor viklingens ledninger er lagt. Brug ved høje omdrejningshastigheder (3000, 1500 o / min) og et lille antal poler.

Synkron motorstart
Et træk ved denne type elektriske maskiner er, at de ikke blot kan tilsluttes til netværket og venter på dens lancering. Derudover er der ikke kun kilden til magnetiseringsstrømmen til brug for lysdioden, men den har også et ret kompliceret startkredsløb.

Opstart forekommer som i en induktionsmotor, og for at skabe et startmoment, ud over feltvikling, placeres en yderligere kortslutning “egernskur” vikling på rotoren. Det kaldes også en "dæmpning" vikling, fordi det øger stabiliteten under pludselige overbelastninger.
Excitationsstrømmen i rotorviklingen ved opstart er fraværende, og når den accelererer til en undersynkron hastighed (3-5% mindre end synkron), påføres exciteringsstrømmen, hvorefter den og statorstrømmen oscillerer, går motoren i synkronisering og går ind i driftstilstand.
For at begrænse startstrømmene for kraftige maskiner reducerer de undertiden spændingen ved terminalerne på statorviklingerne ved at tilslutte en autotransformator eller modstande i serie.
Mens den synkrone maskine starter i asynkron tilstand, er modstande forbundet til feltvikling, hvis modstand overstiger modstanden for selve viklingen 5-10 gange. Dette er nødvendigt, således at den pulserende magnetiske flux, der opstår under virkningen af de strømninger, der induceres i viklingen under opstart, ikke bremser accelerationen og heller ikke for at beskadige viklingerne på grund af den inducerede emk.
typer
Der er mange typer af sådanne maskiner, design af en synkron vekselstrømsmotor med feltviklinger, som den mest almindelige i produktionen, blev beskrevet ovenfor. Der er andre typer, såsom:
- Permanente magnetiske synkronmotorer. Dette er forskellige elektriske motorer, såsom PMSM - synkronmotor med permanent magnet, BLDC - Børsteløs jævnstrøm og andre. Forskelle, som består i kontrolmetoden og formen på strømmen (sinusformet eller trapesformet). De kaldes også børsteløs eller børsteløs motor.Brugt i værktøjsmaskiner, radiostyrede modeller, elværktøj osv. De fungerer ikke direkte fra jævnstrøm, men gennem en speciel konverter.
- Trinmotorer - synkrone børsteløse motorer, hvor rotoren nøjagtigt holder den specificerede position, de bruges til at placere arbejdsværktøjet i CNC-maskinerne og til at styre forskellige elementer i automatiske systemer (for eksempel placeringen af gasspjældsventilen i bilen). De består af en stator, i dette tilfælde er excitationsviklinger placeret på den, og en rotor, der er lavet af magnetisk blødt eller magnetisk hårdt materiale. Strukturelt meget lig de foregående typer.
- Reaktive.
- Hysterese.
- Reaktiv hysterese.
De sidste tre typer LED'er har heller ikke børster, de fungerer på grund af rotorens specielle design. Reaktive lysdioder adskiller tre af deres design: en tværgående stratificeret rotor, en rotor med forskellige poler og en aksialt lagdelt rotor. En forklaring af princippet for deres arbejde er ganske kompliceret og vil tage en stor mængde, så vi vil udelade det. Sådanne motorer i praksis møder du sandsynligvis sjældent. Dette er hovedsageligt laveffektmaskiner, der bruges til automatisering.

Anvendelsesområde
Synkronmotorer er dyrere end asynkrone, derudover kræver de en ekstra kilde til jævnstrømcititation - dette reducerer delvist bredden af omfanget af denne type elektriske maskiner. Synkrone elektriske motorer bruges imidlertid til at drive mekanismer, hvor overbelastning er mulig, og nøjagtig vedligeholdelse af stabile omdrejninger er påkrævet.

Derudover bruges de oftest inden for store kapaciteter - hundreder af kilowatt og enheder af megawatt, og på samme tid, start og stop er temmelig sjældne, det vil sige, maskinerne arbejder døgnet rundt i lang tid. Denne applikation skyldes det faktum, at synkronmaskiner fungerer med cos Ф phi tæt på 1 og kan levere reaktiv strøm til netværket, hvilket forbedrer netværkets effektfaktor og reducerer dets forbrug, hvilket er vigtigt for virksomhederne.
Fordele og ulemper
Med enkle ord har enhver elektrisk bil sine fordele og ulemper. Fordelene ved en synkronmotor er:
- Arbejde med cos Фи = 1 på grund af henholdsvis jævnstrømcititation, de forbruger ikke reaktiv strøm fra netværket.
- Under drift med over-excitation giver de reaktiv strøm til netværket, forbedrer netværkets effektfaktor, spændingsfald og tab i det, og CM for generatorer af kraftværker stiger.
- Det maksimale moment, der er udviklet på LED-akslen, er proportionalt med U og for AD - U² (kvadratisk afhængighed af spænding). Dette betyder, at LED har god belastningskapacitet og stabilitet, som bevares under et spændingsfald i netværket.
- Som en konsekvens af alt dette er rotationshastigheden stabil under overbelastning og bundfald inden for overbelastningskapaciteten, især med stigende excitationsstrøm.
Imidlertid er en betydelig ulempe ved en synkronmotor, at dens design er mere kompliceret end en asynkron med en kortslutningsrotor, der kræves en exciter, uden hvilken den ikke kan arbejde. Alt dette fører til en højere omkostning sammenlignet med asynkrone maskiner og vanskeligheder ved vedligeholdelse og drift.
Måske ender fordele og ulemper ved synkronmotorer der. I denne artikel har vi forsøgt at sammenfatte generelle oplysninger om synkronmotorer. Hvis du har noget at supplere materialet - skriv i kommentarerne.
Relaterede materialer: