Hvad er en induktionsmotor, og hvordan fungerer den
Induktionsmotoren er enkel og pålidelig, og det er derfor, den ofte bruges i produktion og i husholdningsapparater, fra ventildrevet til rotationen af tromlen i vaskemaskinen. I denne artikel fortæller vi dig med enkle ord om, hvad der er asynkron elektriske motorer, hvad er det, og hvordan fungerer denne type elektriske maskiner.
typer
Induktionsmotorer (AM) er opdelt i to hovedgrupper:
- egern burrotor
- med en faserotor.
Hvis vi udelader nuancerne, er forskellen, at ekorn-burrotormotoren ikke har børster og udtalt vikling, er den mindre krævende vedligeholdelse. Mens der i asynkronmotorer med en faserotor er der tre viklinger, der er forbundet med slipringe, hvis strøm fjernes med børster. I modsætning til den foregående, er det bedre at styre drejningsmomentet på akslen, og det er lettere at realisere en jævn start for at reducere hastighedstrømmen.
Resten af motorerne klassificerer:
- efter antallet af forsyningsfaser - enfaset og tofaset (bruges i hverdagen, når det drives af et 220V netværk), og trefaset (mest brugt i produktion og i værksteder).
- ved hjælp af fastgørelse - flange eller på poter.
- ved betjeningstilstand - i en lang, kortvarig eller gentagne gange kortvarig tilstand.
Og en række andre faktorer, der påvirker valget af et bestemt produkt til brug under specifikke forhold.
Meget kan siges om enfasede elektriske motorer: nogle af dem er lanceret gennem en kondensator, og andre kræver en start- og arbejdskapacitet. Der er også muligheder med en kortsluttet drejning, der fungerer uden kondensator og bruges for eksempel i hætter. Hvis du er interesseret, skriv kommentarerne, så skriver vi en artikel om det.
enhed
Per definition definerer “asynkron” en vekselstrømsmotor, i hvilken rotoren roterer langsommere end statorens magnetiske felt, det vil sige asynkront. Men denne definition er ikke for informativ. For at forstå det, skal du finde ud af, hvordan denne motor er designet.
En induktionsmotor, som enhver anden, består af to hoveddele - rotor og stator. "For Dummies" inden for elektricitet dechiffrerer vi:
- Statoren kaldes den faste del af enhver generator eller elektrisk motor.
- Rotoren kaldes den roterende del af motoren, der driver mekanismerne.

Statoren består af et hus, hvis ender er lukket af lejeskærme, hvor lejerne er installeret. Afhængig af motorens formål og kraft bruges glideleje eller rullelejer. Kernen er placeret i etuiet, en vikling er installeret på den. Det kaldes en statorvikling.

Da strømmen skifter for at reducere tab på grund af vandløbstrømme (Foucault strømme) statorkernen trækkes ud fra tynde stålplader, der er isoleret fra hinanden ved skalering og bundet med lak.Der leveres en forsyningsspænding til statorviklingerne, strømmen der strømmer i dem kaldes statorstrømmen.
Antallet af viklinger afhænger af antallet af forsyningsfaser og motorens konstruktion. Så en trefaset motor har mindst tre viklinger forbundet med et stjerne- eller trekantkredsløb. Deres antal kan være større, og det påvirker skaftets rotationshastighed, men vi vil tale om dette senere.
Men med rotoren er tingene mere interessante, som det allerede er nævnt, kan det enten være kortslutning eller fase.

En egern-burrotor er et sæt metalstænger (sædvanligvis aluminium eller kobber), i figuren ovenfor er de angivet med tallet 2, loddet eller indlejret i kernen (1), lukket med ringe (3). Dette design ligner et hjul, hvor husholdte gnavere kører, hvorfor det ofte kaldes "egernsbure" eller "egernshjul", og dette navn er ikke slang, men ganske litterært. For at reducere de højere harmonier i EMF og pulseringen af magnetfeltet lægges stængerne ikke langs akslen, men i en bestemt vinkel i forhold til rotationsaksen.
Faserotoren adskiller sig fra den foregående ved at den allerede har tre viklinger som på en stator. Begyndelsen af viklingerne er forbundet med ringe, normalt kobber, de presses på motorakslen. Senere vil vi kort forklare, hvorfor de er nødvendige.

I begge tilfælde er en af enderne af skaftet forbundet med en mekanisme, der er drevet af bevægelse, det er konisk eller cylindrisk i form med eller uden riller til at installere en flange, en remskive og andre mekaniske drivdele.
Et skovlhjul er fastgjort på den "bageste" del af skaftet, hvilket er nødvendigt for at blæse og afkøle; et hus sættes på foringsrøret over skovlhjulet. Således ledes kold luft langs kanterne af induktionsmotoren, hvis denne impeller af en eller anden grund ikke roterer, vil den overophedes.

Designet af den første induktionsmotor blev udviklet af M.O. Dolivo-Dobrovolsky og han patenterede den i 1889. Uden ændringer har den overlevet til nutiden.
Arbejdsprincip
Asynkrone elektriske maskiner kaldes ofte induktion, dette skyldes deres driftsprincip. Enhver elektrisk motor drives i rotation som et resultat af samspillet mellem magnetfelterne i rotoren og statoren samt på grund af Ampere-kraften. Et magnetfelt på sin side kan eksistere enten omkring en permanent magnet eller omkring en leder, gennem hvilken strøm strømmer. Men hvordan fungerer nøjagtigt en asynkron maskine?
I en induktionsmotor er der i modsætning til andre ingen excitation, der i sig selv vikles, mens har den et magnetfelt? Svaret er enkelt: en induktionsmotor er en transformer.
Overvej princippet for dets drift på eksemplet med en trefasemaskine, da det er dem, der findes oftere end andre.
I figuren nedenfor ser du placeringen af viklingerne på statorkernen i en trefaset asynkronmotor.

Som et resultat af strømmen af en trefasestrøm vises et roterende magnetfelt i statorviklingerne. På grund af faseforskydningen strømmer strømmen enten den ene eller den anden vikling, i overensstemmelse hermed er der et magnetfelt, hvis poler er rettet efter højrehåndsregel. Og i overensstemmelse med ændringen i strøm i en eller anden vikling sendes polerne i den tilsvarende retning. Som følgende animation illustrerer:

I det enkleste (to-polede) tilfælde er viklingerne stablet på en sådan måde, at hver af dem forskydes med 120 grader i forhold til det foregående, ligesom fasevinklen for spændingen i vekselstrømsnettet.
Statormagnetfeltets rotationshastighed kaldes synkront. Lær mere om, hvordan det roterer, og hvorfor du lærer fra den næste video. Bemærk, at i to-fase (kondensator) og enfasede motorer - det roterer ikke, men elliptisk eller pulserende, og viklingerne ikke er 3, men 2.
Hvis vi overvejer en asynkron elektrisk motor med en egern-burrotor, inducerer magnetfeltet til statoren en EMF i dens stænger, da de er lukket, strømmer strømmen.På grund af dette forekommer også et magnetfelt.
Som et resultat af interaktion mellem to felter og Ampere kraftNår den virker på rotoren, begynder den at rotere efter statorens roterende magnetfelt, men det er altid lidt bagved statorens MP rotationshastighed. Dette forsinkelse kaldes slip.
Hvis magnetfeltets rotationshastighed kaldes synkron, er rotorens rotationshastighed allerede asynkron, hvorfra han modtog dette navn.
I AD med en fasrotor er tingene ens, bortset fra at en rheostat er forbundet til dens ringe, som, efter at motoren er gået i driftstilstand, fjernes fra kredsløbet, og viklingerne kortsluttes. Dette er vist i nedenstående diagram, men i stedet for en rheostat bruges, tilsluttes eller kobles konstante modstande af kontaktorer KM3, KM2, KM1.
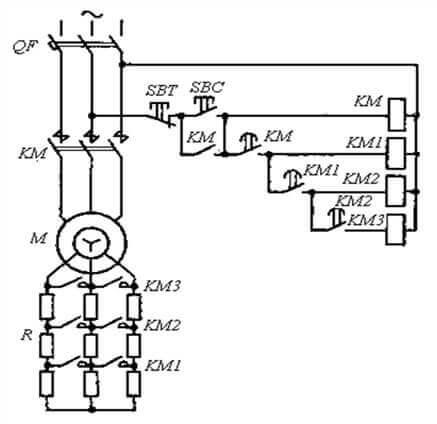
Denne fremgangsmåde muliggør en jævn start og reducerer indbrudstrømme ved at øge rotorens aktive elektriske modstand.
 For at opsummere:
For at opsummere:
- Strømmen i statorviklingerne genererer et magnetfelt.
- Magnetfeltet fører til strøm i rotoren.
- Strømmen i rotoren fører til udseendet af et felt omkring det.
- Da statorfeltet roterer på grund af dets felt, begynder rotoren at rotere bag det.
Slip og rotationshastighed
Statormagnetfeltets (n1) rotationsfrekvens er større end rotorens (n2) rotationsfrekvens. Forskellen mellem dem kaldes slip og betegnes med det latinske bogstav S og beregnes med formlen:
S = (n1-n2) * 100% / n1
Glidning er ikke en ulempe ved denne elektriske motor, for hvis dens aksel roterede med samme frekvens som statormagnetfeltet (synkront), ville der ikke blive induceret nogen strøm i dens stænger, og det ville simpelthen ikke rotere.
Nu om et mere vigtigt koncept - rotationshastigheden for en induktionsmotors rotor. Det afhænger af 3 værdier:
- forsyningsspændingsfrekvens (f);
- antallet af par magnetiske poler (p);
- glide (S).
Antallet af par magnetpoler bestemmer feltets synkrone rotationshastighed og afhænger af antallet af statorviklinger. Glidning afhænger af belastningen og designet af en bestemt elektrisk motor og ligger inden for 3-10%, det vil sige den asynkrone hastighed er meget lidt mindre end den synkrone. Nå, frekvensen af vekselstrømmen er fast til 50 Hz.
Derfor er rotationshastigheden på en induktionsmotors aksel vanskelig at regulere, du kan kun påvirke frekvensen af lysnettet, det vil sige ved at indstille frekvensomformer. Det er muligt at sænke statorspændingen, men derefter aftager kraften på skaftet, alligevel anvendes en sådan teknik, når man starter AM med at skifte viklingerne fra stjerne til delta for at reducere startstrømme.
Statorfeltets rotationsfrekvens (synkron hastighed) bestemmes af formlen:
n = 60 * f / p
Så i en motor med et par magnetpoler (to poler) er den synkrone hastighed:
60 * 50/1 = 3000 o / min
De mest almindelige muligheder for elektriske motorer med:
- et par poler (3000 o / min);
- to (1500 o / min);
- tre (1000 o / min);
- fire (750 o / min).
Den faktiske rotorhastighed vil være lidt lavere, på en reel induktionsmotor er den angivet på typeskiltet, for eksempel her - 2730 o / min. På trods af dette vil folket kalde en sådan asynkron motor i henhold til synkronhastighed eller simpelthen "tre tusinde meter".

Derefter svarer dens slip:
3000-2730*100%/3000=9%
Anvendelsesområde
Asynkron elektrisk motor har fundet anvendelse inden for alle områder af menneskelig aktivitet. Dem, der er drevet fra en fase (fra 220V) kan findes i aktuatorer med lav effekt eller i husholdningsapparater og værktøjer, for eksempel:
- i en vaskemaskine af typen "baby" og andre gamle sovjetiske modeller;
- i en betonblander;
- i blæseren
- i hætten;
- og endda i græsslåmaskiner i det øvre prissegment.



I produktion i trefasede netværk:
- automatiske portventiler;
- hejsemekanismer (kraner og spil);
- ventilation;
- kompressorer;
- pumper;
- træ- og metalbearbejdningsmaskiner og meget mere.




AD bruges også i elektriske køretøjer, og for nylig annonceres den asynkrone motor med en Slavyanka-type vikling og det såkaldte Duyunov-motorhjul aktivt på Internettet, som du kan finde ud af fra udviklerens video.
Omfanget af asynkronmotorer er så stort, at listen alene vil være længere end denne artikel, så enhver elektriker skal vide, hvordan den fungerer, hvad den er til, og hvor den bruges. At opsummere og liste over fordele og ulemper ved disse enheder.
fordele:
- Enkel konstruktion.
- Lav pris
- Næsten ingen vedligeholdelse.
Den største ulempe er vanskeligheden ved at justere hastigheden sammenlignet med de samme jævnstrømsmotorer eller universalopsamlingsmaskiner. Det er følgelig vanskeligt at organisere jævn opstart af store maskiner, og oftere sker dette ved hjælp af en dyr frekvensomformer.
Det er her vi slutter med hensynet til induktionsmotorer og deres omfang. Vi håber, at du efter at have læst artiklen vil forstå, hvad den er, og hvordan denne elektriske maskine fungerer!
Relaterede materialer:




