Hva er en synkronmotor og hvor brukes den
Synkron elektriske motorer (SD) er ikke så vanlige som asynkrone ekorn-burmotorer. Men de brukes der det er behov for et stort dreiemoment og ofte under arbeidet overbelastning. Denne typen motor brukes også der det kreves stor kraft for å drive mekanismene, på grunn av den høye effektfaktoren og evnen til å forbedre kraftfaktoren til nettverket, noe som vil redusere kostnadene for strøm og belastning på linjen betydelig. Hva er en synkronmotor, hvor brukes den og hva er fordeler og ulemper vi vil vurdere i denne artikkelen.
Definisjon og handlingsprinsipp
Enkelt sagt kalles en synkronmotor en elektrisk motor der rotoren (akselen) rotasjonshastighet sammenfaller med statorens magnetfeltets rotasjonshastighet.
La oss kort vurdere driftsprinsippet til en slik elektrisk motor - det er basert på samspillet mellom det roterende statormagnetfeltet, som vanligvis er skapt av trefas vekselstrøm og det konstante magnetfeltet til rotoren.
Det konstante magnetfeltet til rotoren opprettes av eksitasjonsviklingen eller permanente magneter. Strømmen i statorviklingene skaper et roterende magnetfelt, mens rotoren i driftsmodus er en permanent magnet, og dens poler suser til motsatte poler i statormagnetfeltet. Som et resultat roterer rotoren synkront med statorfeltet, som er hovedfunksjonen.
Husk det induksjonsmotor stator MP rotasjonshastighet og rotorens rotasjonshastighet avviker med mengden glid, og dens mekaniske egenskap er "humpet" med en topp under kritisk glidning (under dens nominelle rotasjonshastighet).
Hastigheten som statormagnetfeltet roterer med kan beregnes ved hjelp av følgende ligning:
N = 60f / p
f er frekvensen av strømmen i viklingen, Hz, p er antall polpar.
Følgelig blir rotasjonshastigheten til den synkrone motorakselen bestemt av samme formel.
De fleste AC-elektriske motorer som brukes i produksjonen er laget uten permanente magneter, men med en eksitasjonsvikling, mens synkron AC-motorer med lav effekt er laget med permanente magneter på rotoren.
Strømmen til feltviklingene leveres av ringer og en børsteenhet. I motsetning til en elektrisk kollektormotor, der en kollektor (et sett med langsgående anordnede plater) brukes til å overføre strøm til en roterende spole, er ringer montert på den synkrone over den ene enden av statoren.
Thyristor-eksitatorer, ofte kalt "VTE" (med navnet en av seriene med slike enheter for innenlandsk produksjon), er for øyeblikket kilden til likestrøms eksitasjon.Tidligere ble generator-motorens eksitasjonssystem brukt, da en generator ble installert på samme aksel med motoren (det er også en eksiterer), som motstander påført strøm på feltviklingen.
Rotoren til nesten alle synkron DC-motorer utføres uten eksitasjonsvikling, og med permanente magneter, selv om de i prinsippet ligner AC lysdioder, er de veldig forskjellige når det gjelder hvordan de er tilkoblet og kontrollert fra klassiske trefasede maskiner.
En av hovedegenskapene til en elektrisk motor er en mekanisk egenskap. Hun synkroniserer motorer nær en rett horisontal linje. Dette betyr at belastningen på akselen ikke påvirker hastigheten (før den når en viss kritisk verdi).
 asynkrone og b) synkrone motorer")
Dette oppnås nettopp på grunn av jevn strømeksitasjon, og derfor opprettholder en synkron elektrisk motor perfekt konstante omdreininger under skiftende belastninger, overbelastninger og spenningsfall (opp til en viss grense).
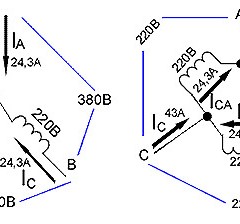
Nedenfor ser du symbolet på diagrammet til den synkrone maskinen.

Rotordesign
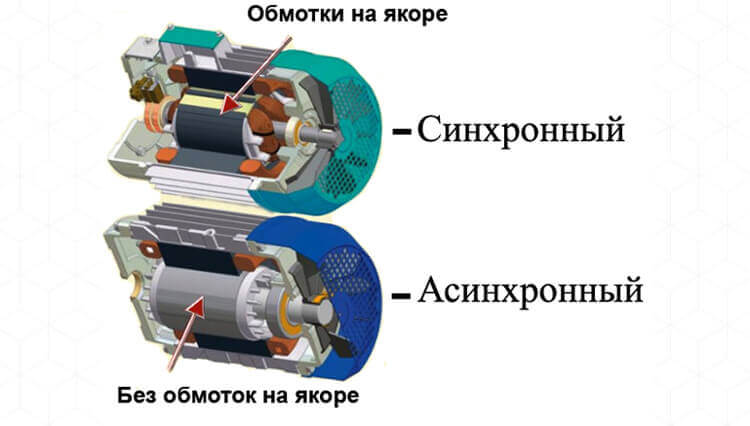
Som alle andre består en synkron elektrisk motor av to hoveddeler:
- Statoren. Viklingene er plassert i den. Det kalles også et anker.
- Rotor. Permanente magneter eller en eksitasjonsvikling er installert på den. Det kalles også en induktor, på grunn av dens formål - å lage et magnetfelt).
For å tilføre strømmen til feltviklingen er det installert 2 ringer på rotoren (siden eksitasjonen er likestrøm, "+" tilføres den ene av dem, og "-" til den andre). Børster er festet til børsteholderen.

Rotorene til synkron AC-motorer er av to typer, avhengig av formålet:
- Eksplisitt polar. Staver (spoler) er godt synlige. Brukes i lave hastigheter og et stort antall stolper.
- Implisitt - det ser ut som en rund blank, i sporet som viklingens ledninger er lagt på. Brukes med høye rotasjonshastigheter (3000, 1500 o / min) og et lite antall poler.

Synkron motorstart
Et kjennetegn ved denne typen elektriske maskiner er at de ikke bare kan kobles til nettverket og vente på lansering. I tillegg er det ikke bare kilden til eksitasjonsstrømmen som er nødvendig for drift av LED, den har også en ganske komplisert oppstartkrets.

Oppstart skjer som i en induksjonsmotor, og for å skape et startmoment, i tillegg til feltviklingen, plasseres en ekstra kortsluttet "ekornbur" -vikling på rotoren. Det kalles også en "dempende" vikling, fordi den øker stabiliteten ved plutselige overbelastninger.
Excitasjonsstrømmen i rotorviklingen ved oppstart er fraværende, og når den akselererer til en sub-synkron hastighet (3-5% mindre enn synkron), påføres eksitasjonsstrømmen, hvoretter den og statorstrømmen svinger, går motoren i synkronisme og går inn i driftsmodus.
For å begrense startstrømmene til kraftige maskiner reduserer de noen ganger spenningen ved terminalene til statorviklingene ved å koble en autotransformator eller motstand i serie.
Mens den synkrone maskinen starter i asynkron modus, er motstander koblet til feltviklingen, hvis motstand overskrider motstanden til selve viklingen med 5-10 ganger. Dette er nødvendig slik at den pulserende magnetiske fluks som oppstår under virkningen av strømningene indusert i viklingen under oppstart ikke bremser akselerasjonen, og heller ikke for å skade viklingene på grunn av emk indusert i den.
Visninger
Det er mange typer slike maskiner. Utformingen av en synkron vekselstrømmotor med eksitasjonsviklinger, som den vanligste i produksjonen, ble beskrevet ovenfor. Det finnes andre typer, for eksempel:
- Permanente magnet synkronmotorer. Dette er forskjellige elektriske motorer, for eksempel PMSM - permanent magnet synkronmotor, BLDC - Børsteløs likestrøm og andre. Forskjeller som består i kontrollmetoden og formen på strømmen (sinusformet eller trapesformet). De kalles også børsteløse eller børsteløse motorer.Brukes i maskinverktøy, radiostyrte modeller, elektroverktøy osv. De fungerer ikke direkte fra likestrøm, men gjennom en spesiell omformer.
- Trinnmotorer - synkrone børsteløse motorer, der rotoren nøyaktig holder den spesifiserte posisjonen, de brukes til å plassere arbeidsverktøyet i CNC-maskinene og for å kontrollere forskjellige elementer i automatiske systemer (for eksempel plasseringen av gassventilen i bilen). De består av en stator, i dette tilfellet er eksitasjonsviklinger plassert på den, og en rotor, som er laget av magnetisk mykt eller magnetisk hardt materiale. Strukturelt veldig lik de forrige typene.
- Reaktiv.
- Hysterese.
- Reaktiv hysterese.
De tre siste LED-typene har heller ikke børster, de fungerer på grunn av den spesielle utformingen av rotoren. Reaktive lysdioder skiller tre av deres design: en tverrstratifisert rotor, en rotor med forskjellige poler og en aksialt lagdelt rotor. En forklaring av prinsippet for deres arbeid er ganske komplisert, og vil ta en stor mengde, så vi vil utelate det. Slike motorer i praksis vil du sannsynligvis møte sjelden. Dette er hovedsakelig laveffektmaskiner som brukes i automatisering.

Bruksområde
Synkronmotorer er dyrere enn asynkrone, i tillegg krever de en ekstra kilde til likestrømksitasjon - dette reduserer delvis bredden på omfanget av denne typen elektriske maskiner. Synkrone elektriske motorer brukes imidlertid til å drive mekanismer der overbelastning er mulig og nøyaktig vedlikehold av stabile omdreininger er nødvendig.

Dessuten brukes de oftest innen store kapasiteter - hundrevis av kilowatt og enheter med megawatt, og samtidig er start og stopp ganske sjeldne, det vil si at maskinene jobber døgnet rundt i lang tid. Denne applikasjonen skyldes det faktum at synkrone maskiner opererer med cos Ф phi nær 1, og kan levere reaktiv kraft til nettverket, noe som forbedrer nettets effektfaktor og reduserer forbruket, noe som er viktig for bedriftene.
Fordeler og ulemper
Med enkle ord, da har enhver elektrisk bil sine fordeler og ulemper. Fordelene med en synkronmotor er:
- Arbeid med cos Фи = 1, på grunn av likestrøm-eksitasjon, henholdsvis forbruker de ikke reaktiv strøm fra nettverket.
- Under drift, med overexcitation, gir de reaktiv kraft til nettverket, forbedrer nettets kraftfaktor, spenningsfallet og tapene i det, og CM for generatorer av kraftverk øker.
- Det maksimale momentet som er utviklet på LED-akselen er proporsjonalt med U, og for AD - U² (kvadratisk avhengighet av spenning). Dette betyr at LED har god lastekapasitet og stabilitet, som er bevart under et spenningsfall i nettverket.
- Som en konsekvens av alt dette er rotasjonshastigheten stabil under overbelastning og fall, innenfor overbelastningskapasiteten, spesielt med økende eksitasjonsstrøm.
Imidlertid er en betydelig ulempe ved en synkronmotor at utformingen er mer komplisert enn den for en asynkron med en kortslutningsrotor, det trengs en eksiterer uten hvilken den ikke kan fungere. Alt dette fører til høyere kostnader sammenlignet med asynkrone maskiner og vanskeligheter med vedlikehold og drift.
Kanskje ender fordelene og ulempene med synkronmotorer der. I denne artikkelen har vi prøvd å oppsummere generell informasjon om synkronmotorer. Hvis du har noe å supplere materialet - skriv i kommentarene.
Relaterte materialer: