Mikä on synkronimoottori ja missä sitä käytetään
Synkroniset sähkömoottorit (SD) eivät ole yhtä yleisiä kuin asynkroniset oravakorimoottorit. Mutta niitä käytetään siellä, missä tarvitaan suurta vääntömomenttia, ja työn aikana usein ylikuormittaa. Tämän tyyppisiä moottoreita käytetään myös silloin, kun mekanismien käyttämiseen tarvitaan suurta tehoa, johtuen korkeasta tehokertoimesta ja mahdollisuudesta parantaa verkon tehokerrointa, mikä vähentää merkittävästi sähkön kustannuksia ja linjan kuormitusta. Mikä on synkronimoottori, missä sitä käytetään ja mitkä ovat sen edut ja haitat, otamme huomioon tässä artikkelissa.
Määritelmä ja toimintaperiaate
Yksinkertaisesti sanottuna synkroniseksi moottoriksi kutsutaan sähkömoottoria, jonka roottorin (akselin) pyörimisnopeus on sama kuin staattorin magneettikentän pyörimisnopeus.
Tarkastellaan lyhyesti tällaisen sähkömoottorin toimintaperiaatetta - se perustuu pyörivän staattorin magneettikentän vuorovaikutukseen, joka yleensä luodaan kolmivaiheisella vaihtovirralla ja roottorin vakiona olevalla magneettikentällä.
Roottorin vakio magneettikenttä syntyy virityskäämin tai kestomagneettien avulla. Staattorikäämityksissä oleva virta luo pyörivän magneettikentän, kun taas toimintatilassa oleva roottori on kestomagneetti, sen navat ryntävät staattorin magneettikentän vastakkaisille napoille. Seurauksena roottori pyörii synkronisesti staattorikentän kanssa, mikä on sen pääominaisuus.
Muistakaa se induktiomoottori staattorin MP pyörimisnopeus ja roottorin pyörimisnopeus eroavat liukastuksen määrästä, ja sen mekaaniset ominaisuudet “hyppy” huipulla kriittisen liukumisen aikana (alle nimelliskierrosnopeuden).
Staattorin magneettikentän pyörimisnopeus voidaan laskea seuraavan yhtälön avulla:
N = 60f / p
f on käämin virran taajuus, Hz, p on napaparien lukumäärä.
Vastaavasti synkronisen moottorin akselin pyörimisnopeus määritetään samalla kaavalla.
Suurin osa tuotannossa käytetyistä vaihtovirtamoottoreista valmistetaan ilman pysyviä magneetteja, mutta virityskäämityksellä, kun taas pienitehoiset synkroniset vaihtovirtamoottorit valmistetaan pysyvillä magneeteilla roottorilla.
Virta kenttäkäämiin syötetään renkaissa ja harjakokoonpanossa. Toisin kuin kollektorisähkömoottori, jossa kollektoria (pitkittäin järjestettyjä levyjä) käytetään virran siirtämiseen pyörivään kelaan, renkaat asennetaan synkronisesti staattorin toisen pään yli.
Tyyristoristimit, joita usein kutsutaan "VTE" (yhden tällaisen kotimaisen tuotannon laitesarjan nimellä), ovat tällä hetkellä tasavirran virityksen lähde.Aikaisemmin käytettiin generaattorimoottorin viritysjärjestelmää, kun generaattori asennettiin samaan akseliin moottorin kanssa (se on myös viritys), joka vastukset kohdistettu virta kentän käämitykseen.
Melkein kaikkien synkronisten tasavirtamoottoreiden roottori suoritetaan ilman virityskäämiä ja kestomagneeteilla, vaikka ne ovat periaatteessa samanlaisia kuin vaihtovirta LEDit, mutta ne eroavat toisistaan huomattavasti sen suhteen, miten ne kytketään ja ohjataan klassisista kolmivaiheisista koneista.
Yksi sähkömoottorin pääominaisuuksista on mekaaninen ominaisuus. Hän synkronimoottorit lähellä suoraa vaakasuoraa viivaa. Tämä tarkoittaa, että akselin kuorma ei vaikuta sen nopeuteen (kunnes se saavuttaa jonkin kriittisen arvon).
 asynkronisten ja b) synkronisten moottorien mekaaniset ominaisuudet")
Tämä saavutetaan tarkalleen tasavirran virityksen ansiosta, minkä vuoksi synkroninen sähkömoottori ylläpitää täydellisesti vakionopeuksia muuttuvien kuormien, ylikuormitusten ja jännitehäviöiden aikana (tiettyyn rajaan saakka).
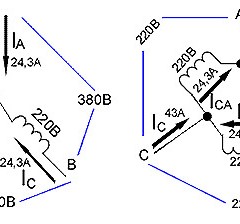
Alla näet symbolin synkronisen koneen kaaviossa.

Roottorin suunnittelu
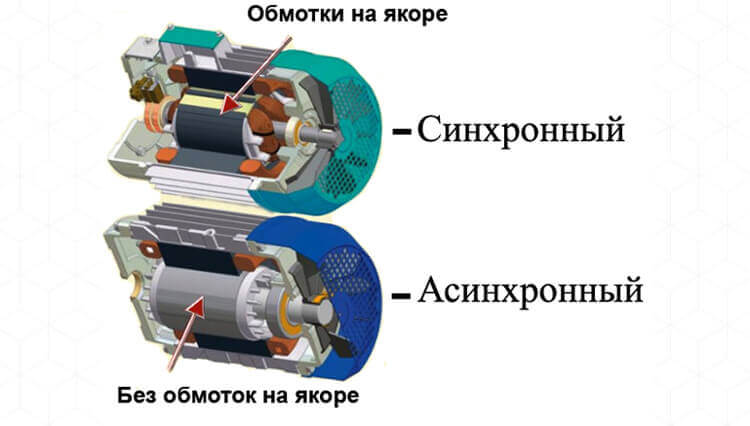
Kuten mikään muu, synkroninen sähkömoottori koostuu kahdesta pääosasta:
- Staattori. Käämitykset sijaitsevat siinä. Sitä kutsutaan myös ankkuriksi.
- Roottori. Pysyvät magneetit tai virityskäämi on asennettu siihen. Sitä kutsutaan myös induktoriksi, koska sen tarkoitus - luoda magneettikenttä).
Virran syöttämiseksi kenttäkäämitykseen roottoriin asennetaan 2 rengasta (koska viritys tapahtuu tasavirralla, "+" syötetään yhdelle niistä ja "-" toiselle). Harjat kiinnitetään harjan pidikkeeseen.

Synkronisten vaihtovirtamoottoreiden roottorit ovat kahta tyyppiä tarkoituksesta riippuen:
- Selvästi polaarinen. Navat (kelat) ovat selvästi näkyvissä. Käytä pienillä nopeuksilla ja suurella määrällä napoja.
- Epäsuora - se näyttää pyöreältä aihiolta urassa, johon käämien johdot on asetettu. Käytä suurilla pyörimisnopeuksilla (3000, 1500 rpm) ja pienellä määrä napoja.

Synkroninen moottorin käynnistys
Tämän tyyppisten sähkökoneiden ominaisuus on, että niitä ei voida yksinkertaisesti kytkeä verkkoon ja odottaa käynnistystä. Lisäksi LED: n toimintaan tarvitaan viritysvirran lähteen lisäksi myös melko monimutkainen käynnistyspiiri.

Käynnistys tapahtuu kuten induktiomoottorissa, ja käynnistysmomentin luomiseksi kenttäkäämin lisäksi roottorille asetetaan ylimääräinen oikosuljettu "orakori" -käämi. Sitä kutsutaan myös ”vaimentavaksi” käämitykseksi, koska se lisää vakautta äkillisten ylikuormitusten aikana.
Roottorin käämityksessä ei ole herätevirtaa käynnistyksen yhteydessä, ja kun se kiihtyy alisynkroniseen nopeuteen (3-5% vähemmän kuin synkroninen), viritysvirta syötetään, jonka jälkeen se ja staattorivirran heilahtaa, moottori siirtyy synkronointiin ja siirtyy toimintatilaan.
Voimakkaiden koneiden käynnistysvirtojen rajoittamiseksi ne vähentävät joskus jännitettä staattorin käämien liittimissä kytkemällä autotransformers tai vastukset sarjaan.
Samalla kun synkroninen kone käynnistyy asynkronisessa tilassa, vastus on kytketty kenttäkäämiin, jonka vastus ylittää itse käämin vastus 5-10 kertaa. Tämä on välttämätöntä, jotta käynnistyksen aikana käämitykseen indusoitujen virtojen vaikutuksesta syntyvä sykkivä magneettinen vuoto ei hidasta kiihdytystä, eikä myöskään vaurioittaisi käämiä johtuen siitä indusoidusta emf: stä.
tyypit
Tällaisia koneita on paljon tyyppejä, synkronisen vaihtovirtamoottorin suunnittelu kenttäkäämillä, kuten yleisin tuotannossa, on kuvattu edellä. On muita tyyppejä, kuten:
- Pysyvät magneettisynkroniset moottorit. Nämä ovat erilaisia sähkömoottoreita, kuten PMSM - kestomagneettisynkroninen moottori, BLDC - harjaton tasavirta ja muut. Erot säätömenetelmän ja virran muodon välillä (sinimuotoinen tai puolisuunnikkaan muotoinen). Niitä kutsutaan myös harjattomiksi tai harjattomiksi moottoreiksi.Käytetään työstökoneissa, radio-ohjattavissa malleissa, sähkötyökaluissa jne. Ne eivät toimi suoraan tasavirrasta, vaan erityisen muuntimen kautta.
- Askelmoottorit - synkroniset harjattomat moottorit, joissa roottori pitää tarkkaan määritellyssä asennossa. Niitä käytetään työkalun sijoittamiseen CNC-koneissa ja automaattisten järjestelmien eri osien ohjaamiseen (esimerkiksi kuristusventtiilin sijainti autossa). Ne koostuvat staattorista, tässä tapauksessa siihen sijaitsevat virityskäämit, ja roottorista, joka on valmistettu magneettisesti pehmeästä tai magneettisesti kovasta materiaalista. Rakenteellisesti hyvin samanlainen kuin aikaisemmat tyypit.
- Reaktiivinen.
- Hystereesi.
- Reaktiivinen hystereesi.
Kolmessa viimeisessä LED-tyypissä ei myöskään ole harjoja, ne toimivat roottorin erityissuunnittelun takia. Reaktiiviset LEDit erottavat kolme niiden mallista: poikittaisesti kerrostuneen roottorin, erillisillä napoilla varustetun roottorin ja aksiaalisesti ositetun roottorin. Heidän työnsä periaatteen selittäminen on melko monimutkaista, ja se vie paljon, joten jätämme sen pois. Tällaisia moottoreita käytännössä kohtaat todennäköisesti harvoin. Nämä ovat pääosin automaatiossa käytettyjä pienitehoisia koneita.

Soveltamisala
Synkroniset moottorit ovat kalliimpia kuin asynkroniset, ja ne vaativat lisäksi tasavirran herättämisen lähteen - tämä vähentää osittain tämän tyyppisten sähkökoneiden laajuutta. Synkronisia sähkömoottoreita kuitenkin käytetään ohjaamaan mekanismeja, joissa ylikuormitukset ovat mahdollisia ja vakaiden kierrosten tarkka ylläpito vaaditaan.

Lisäksi niitä käytetään useimmiten suurten kapasiteettien alalla - satoja kilowatteja ja yksiköitä megawatteja, ja samaan aikaan käynnistys ja pysäytys ovat melko harvinaisia, ts. Koneet toimivat ympäri vuorokauden pitkään. Tämä sovellus johtuu siitä, että synkroniset koneet toimivat cos Ф phi: n lähellä lähellä yhtä ja voivat toimittaa verkkoon reaktiivista tehoa, mikä parantaa verkon tehokerrointa ja vähentää sen kulutusta, mikä on tärkeätä yrityksille.
Edut ja haitat
Yksinkertaisin sanoin, jokaisella sähköautolla on hyvät ja huonot puolensa. Synkronisen moottorin etuja ovat:
- Työskentele cos Фи = 1: n kanssa tasavirran virityksen vuoksi, joten ne eivät kuluta verkon reaktiivista tehoa.
- Käytön aikana ylikuormituksella ne antavat verkolle reaktiivisen tehon, parantaen verkon tehokerrointa, jännitehäviöitä ja häviöitä siinä, ja voimalaitosten generaattoreiden CM lisääntyy.
- LEDin akselille kehittyvä maksimimomentti on verrannollinen U: seen ja AD - U²: lle (neliöllinen riippuvuus jännitteestä). Tämä tarkoittaa, että LEDillä on hyvä kuormituskapasiteetti ja vakaus, joka säilyy verkon jännitehäviön aikana.
- Kaiken tämän seurauksena pyörimisnopeus on vakaa ylikuormituksen ja laskun aikana ylikuormituskapasiteetin puitteissa, etenkin kun viritysvirta kasvaa.
Synkronisen moottorin merkittävä haitta on kuitenkin se, että sen suunnittelu on monimutkaisempi kuin oikosulkuroottorin kanssa asynkronisen, tarvitaan viritinvahvistin, jota ilman se ei voi toimia. Kaikki tämä johtaa korkeampiin kustannuksiin verrattuna asynkronisiin koneisiin ja vaikeuksiin ylläpidossa ja käytössä.
Ehkä synkronisten moottorien edut ja haitat päättyvät siihen. Tässä artikkelissa olemme yrittäneet tehdä yhteenvedon synkronimoottoreita koskevista yleisistä tiedoista. Jos sinulla on jotain täydentääksesi materiaalia - kirjoita kommentteihin.
Aiheeseen liittyvät materiaalit: