Hvorfor er der behov for reaktiv strømkompensation, og hvordan implementeres den
definition
Fuld elektrisk energi består af aktiv og reaktiv energi:
S = Q + P
Her er Q reaktiv, P er aktiv.
Reaktiv effekt forekommer i magnetisk og elektriske feltersom er karakteristiske for induktive og kapacitive belastninger, når man arbejder i vekslingskredsløb. Under aktiv belastningsdrift er spændings- og strømningsfaserne de samme og falder sammen. Når der tilsluttes en induktiv belastning, hænger spændingen bag strømmen, og når den er kapacitiv, er den foran.

Kosinus af forskydningsvinklen mellem disse faser kaldes effektfaktoren.
cos Φ = P / S
P = S * cos Φ
Vinkens kosinus er altid mindre end enhed, den aktive kraft er altid mindre end den samlede. Reaktiv strøm flyder i den modsatte retning i forhold til den aktive og forhindrer dens passage. Da en fuld belastningsstrøm flyder gennem ledningerne:
S = U * I
Selv når man udvikler kraftlinjeprojekter, er det nødvendigt at tage hensyn til forbruget af aktiv og reaktiv energi. Hvis sidstnævnte er for meget, bliver du nødt til at øge tværsnittet af linjerne, hvilket fører til yderligere omkostninger. Derfor kæmper de med det. Kompensation af reaktiv energi reducerer belastningen på netværket og sparer energi fra industrielle virksomheder.
Hvor det er vigtigt at overveje kosinus-phi
Lad os se, hvor og hvornår der er behov for reaktiv strømkompensation. For at gøre dette skal du analysere kilderne.

Et eksempel på en primær reaktiv belastning er:
- elektriske motorer solfanger og asynkron, især hvis det er i driftstilstand, at dens belastning er lille for en bestemt motor;
- elektromekaniske aktuatorer (magnetventiler, ventiler, elektromagneter);
- elektromagnetiske omskifter;
- transformere, især på tomgang.
Grafen viser ændringen i cos Φ for den elektriske motor, når belastningen ændres.

Grundlaget for de fleste industrielle virksomheds elektriske faciliteter er et elektrisk drev. Derfor er det høje forbrug af reaktiv energi. Private forbrugere betaler ikke for sit forbrug, og virksomhederne betaler. Dette medfører ekstraomkostninger fra 10 til 30% eller mere af den samlede mængde elregninger.
Typer af kompensatorer og deres driftsprincip
For at reducere reagenset bruges reaktive effektkompensationsanordninger, den såkaldte UKRM. Som strømkompensator i praksis bruges oftest:
- kondensatorbanker;
- synkronmotorer.
Da mængden af reaktiv effekt kan ændre sig over tid, betyder det, at kompensatorerne kan være:
- Ikke-reguleret - normalt en kondensatorbank uden evnen til at frakoble individuelle kondensatorer for at ændre kapacitans.
- Automatisk - kompensationsniveauer varierer afhængigt af netværksstatus.
- Dynamisk - kompensere, når belastningen hurtigt ændrer karakter.
Kredsløbet bruger, afhængigt af mængden af reaktiv energi, fra et til et helt batteri af kondensatorer, der kan indsættes og fjernes fra kredsløbet. Så kan ledelse være:
- manuel (afbrydere);
- halvautomatisk (trykknapper med kontaktorer);
- ukontrollerbare, så forbindes de direkte til belastningen, tændes og slukkes med den.
Kondensatorbatterier kan installeres både i transformatorstationer og direkte i nærheden af forbrugere, hvorefter enheden er tilsluttet deres kabler eller strømbusser. I sidstnævnte tilfælde beregnes de normalt på den individuelle kompensation af reagenset fra en bestemt motor eller anden enhed - det findes ofte på udstyr i elektriske netværk på 0,4 kV.

Centraliseret kompensation udføres enten ved grænsen til balanceafsnittet i netværk eller ved en transformatorstation og kan udføres i højspændingsnetværk på 110 kV. Den gode ting er, at den aflæser højspændingsledningerne, men den dårlige ting er, at 0,4 kV-linjerne og selve transformeren ikke er losset. Denne metode er billigere end resten. På samme tid kan den lave side på 0,4 kV også aflæses centralt, hvorefter UKRM er forbundet til de busser, som transformerens sekundære vikling er forbundet til, og den er også aflæst.

Der kan også være en gruppekompensationsindstilling. Dette er en mellemform mellem centraliseret og individuelt.
En anden måde er kompensation med synkronmotorer, som kan kompensere for reaktiv effekt. Det vises, når motoren er i over-excitationstilstand. En sådan løsning anvendes i netværk på 6 kV og 10 kV og forekommer også op til 1000V. Fordelen ved denne metode før installation af kondensatorbanker er muligheden for at bruge en kompensator til at udføre nyttigt arbejde (f.eks. Rotation af kraftige kompressorer og pumper).

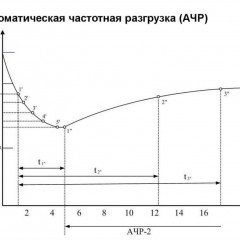
Grafen viser en U-formet karakteristik af en synkronmotor, som afspejler statorstrømmen afhængighed af excitationsstrømmen. Under det ser du, hvad den kosinus-phi er lig med. Når den er større end nul, er motoren kapacitiv i naturen, og når kosinus er mindre end nul, er belastningen kapacitiv og kompenserer for den reaktive effekt fra resten af de induktive forbrugere.
konklusion
For at opsummere, liste over hovedpunkterne om reaktiv energikompensation:
- Formål - losning af kraftledninger og elektriske netværk fra virksomheder. Enheden kan indeholde anti-resonans choker for at reducere niveauet netværksharmonik.
- Privatpersoner betaler ikke regninger for det, men virksomhederne betaler.
- Kompensatoren inkluderer kondensatorbanker eller synkrone maskiner bruges til samme formål.
Vi anbefaler også at se nyttige videoer om artiklets emne:
Relaterede materialer:



I henhold til V.E. Kitaevs bog, L.S. Shlyapintokh "Elektroteknik med grundlæggende oplysninger om industriel elektronik", afsnit 54 for udgivelsesbogen fra 1968 og afsnit 53 for udgivelsesbogen fra 1973, er det klart skrevet: .... "at i et vekselstrømskredsløb, der kun indeholder induktans, strøm forsinker spænding... .. og foran EMF-selvinduktion. Det kan vi sige i det induktive kredsløb er spændingen 90 grader foran fase i strømmen.
Hvad angår den kapacitive belastning, siger den samme bog (næste afsnit nr. 55 til udgivelsen af 1968 og nr. 54 til udgivelsen af 1973): ...."ved opladning og afladning af en kondensator …. Strømmen er en kvart fase foran fasespændingen, dvs. 90 grader.
Og du har skrevet det modsatte ...