Què és un motor síncron i on s’utilitza
Els motors elèctrics sincrònics (SD) no són tan freqüents com els motors asíncrons d'esquirol-gàbia. Però s’utilitzen on es necessita un parell gran i durant el treball freqüent sobrecàrrega. També s’utilitza aquest tipus de motors on es necessita una gran potència per impulsar els mecanismes, a causa de l’elevat factor de potència i la capacitat de millorar el factor de potència de la xarxa, cosa que reduirà significativament el cost d’electricitat i la càrrega a la línia. Què és un motor síncron, on s’utilitza i quins són els seus avantatges i avantatges que tindrem en compte en aquest article.
Definició i principi d’acció
En termes simples, un motor síncron s'anomena motor elèctric la velocitat de rotació del rotor (eix) coincideix amb la velocitat de rotació del camp magnètic de l'estator.
Analitzem breument el principi de funcionament d’aquest motor elèctric: es basa en la interacció d’un camp magnètic d’estator giratori, que normalment està creat per un corrent altern trifàsic i un camp magnètic constant del rotor.
El camp magnètic constant del rotor es crea mitjançant l'imants de la excitació o els imants permanents. El corrent dels bobinatges de l'estator crea un camp magnètic giratori, mentre que el rotor en mode de funcionament és un imant permanent, els seus pols es precipiten als pols oposats del camp magnètic de l'estator. Com a resultat, el rotor gira de forma sincrònica amb el camp de l'estator, que és la seva característica principal.
Recordem que motor d’inducció la velocitat de rotació de l'estator MP i la velocitat de rotació del rotor difereixen per la quantitat de relliscades, i la seva característica mecànica es "empenta" amb un pic durant el lliscament crític (per sota de la seva velocitat de rotació nominal).
La velocitat amb la qual gira el camp magnètic de l'estator es pot calcular mitjançant l'equació següent:
N = 60f / p
f és la freqüència del corrent en el bobinat, Hz, p és el nombre de parells de pols.
D’acord amb això, la velocitat de rotació de l’eix del motor sincrònic està determinada per la mateixa fórmula.
La majoria dels motors elèctrics de CA utilitzats en la producció es fabriquen sense imants permanents, però amb bobinatge d’excitació, mentre que els motors de CA sincrònics de baixa potència es fabriquen amb imants permanents al rotor.
El corrent de la bobina es proporciona amb anells i un conjunt de raspalls. A diferència d’un motor elèctric de col·lector, on s’utilitza un col·lector (un conjunt de plaques disposades longitudinalment) per transmetre corrent a una bobina giratòria, els anells es munten a la sincrònica a través d’un extrem de l’estator.
Els excitadors de tiristors, sovint anomenats "VTE" (pel nom d'una de les sèries d'aquests dispositius de producció domèstica) són actualment la font d'excitació de corrent directe.Anteriorment, s’utilitzava el sistema d’excitació del generador-motor, quan es va instal·lar un generador al mateix eix amb el motor (també és un excitator), que resistències corrent aplicat al bobinat de camp.
El rotor de gairebé tots els motors DC sincrònics es realitza sense bobinatge d’excitació, i amb imants permanents, tot i que, en principi, són similars als LED AC, són molt diferents pel que fa a la connexió i el control de les màquines trifàsiques clàssiques.
Una de les característiques principals d’un motor elèctric és una característica mecànica. Ella motors síncrons a prop d'una línia horitzontal recta. Això significa que la càrrega a l’eix no afecta la seva velocitat (fins que no aconsegueixi algun valor crític).
 asíncrons i b) síncrons")
Això s'aconsegueix precisament a causa de l'excitació de corrent directe; per tant, un motor elèctric síncron manté perfectament revolucions constants en canvis de càrregues, sobrecàrregues i baixades de tensió (fins a un cert límit).
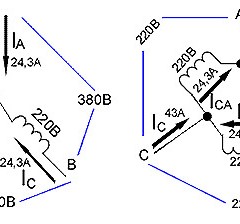
A continuació, veieu el símbol del diagrama de la màquina síncrona.

Disseny del rotor
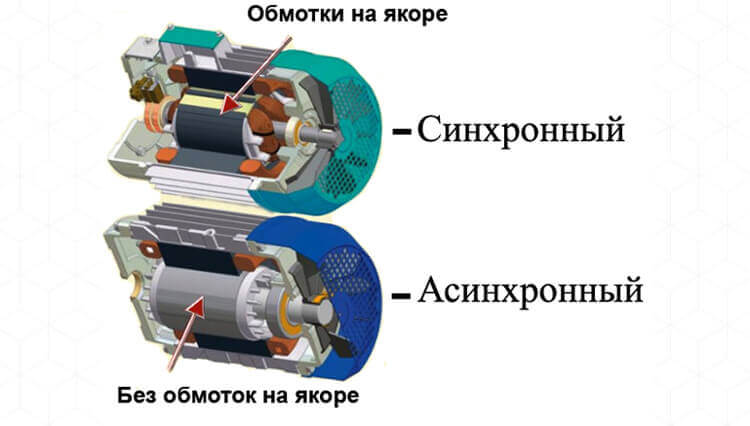
Com qualsevol altra, un motor elèctric síncron consta de dues parts principals:
- Stator. Els bobinatges es troben al seu interior. També s’anomena àncora.
- Rotor. Hi són instal·lats imants permanents o un bobinat d’excitació. També s’anomena inductor, a causa del seu propòsit: crear un camp magnètic).
Per subministrar corrent al bobinatge de camp, s’instal·len 2 anells al rotor (ja que l’excitació és per corrent directe, “+” se subministra a un d’ells i “-” a l’altre). Els pinzells s’adhereixen al suport del raspall.

Els rotors dels motors de sincronització de CA són de dos tipus, segons la finalitat:
- Explicitament polar. Els pals (bobines) són clarament visibles. S'utilitza a velocitats baixes i un gran nombre de pals.
- Implicit: sembla un blanc rodó a la ranura sobre la qual es posen els fils de les bobines. Utilitzeu-lo a altes velocitats de rotació (3000, 1500 rpm) i un nombre reduït de pals.

Arrencada del motor síncron
Una característica d’aquest tipus de màquines elèctriques és que no es pot connectar simplement a la xarxa i esperar al seu llançament. A més, per al funcionament del LED, no només es necessita la font del corrent d’excitació, sinó que també té un circuit d’arrencada força complicat.

La posada en marxa es produeix com en un motor d’inducció i, per crear un moment d’inici, a més del bobinatge de camp, es col·loca un enrotllament addicional de curtcircuit “gàbia d’esquirol” al rotor. També s'anomena enrotllament "amortidor", ja que augmenta l'estabilitat durant les sobrecàrregues sobtades.
No hi ha corrent d’excitació en el bobinatge del rotor a la posada en marxa i, quan s’accelera a una velocitat subcrònica (un 3-5% menys que síncrona), s’aplica el corrent d’excitació, després del qual, i el corrent d’estator oscil·len, el motor entra en sincronisme i entra en el mode de funcionament.
Per limitar els corrents d’arrencada de màquines potents, de vegades redueixen la tensió als terminals dels bobinatges de l’estator connectant un autotransformador o resistències en sèrie.
Mentre que la màquina sincrònica s’engega en mode asíncron, les resistències estan connectades al bobinat de camp, la resistència de la qual supera la resistència del bobinatge en si mateix de 5-10 vegades. Això és necessari per tal que el flux magnètic pulsatiu que es produeixi sota l’acció dels corrents induïts en el bobinat durant la posada en marxa no alenteixi l’acceleració, i també per no danyar els enrotllaments deguts a l’emf induïda en ell.
Espècie
Hi ha molts tipus d’aquestes màquines, el disseny d’un motor de corrent altern sincrònic amb bobinats d’excitació, com el més comú en la producció, es va descriure anteriorment. Hi ha altres tipus, com ara:
- Motors síncrons amb imant permanent. Es tracta de diversos motors elèctrics, com ara PMSM - motor sincrònic d’imant permanent, BLDC - Corrent directe sense raspall i altres. Les diferències entre els quals consisteixen en el mètode de control i la forma del corrent (sinusoïdal o trapezoïdal). També s’anomenen motors sense escombretes o sense raspalls.S'utilitza en màquines-eina, models de radiocontrol, eines elèctriques, etc. No funcionen directament des de corrent directe, sinó mitjançant un convertidor especial.
- Motors pas a pas: motors sincronitzats sense escombretes, en els quals el rotor manté precisament la posició especificada, s’utilitzen per situar l’eina de treball a les màquines CNC i per controlar diversos elements dels sistemes automàtics (per exemple, la posició de la vàlvula d’acceleració al cotxe). Consisteixen en un estator, en aquest cas, hi ha uns bobinats d’excitació i un rotor, que està fabricat amb un material magnèticament suau o magnèticament dur. Estructuralment molt similar als tipus anteriors.
- Reactiu.
- Histèresi.
- Histèresi reactiva.
Els tres últims tipus de LED tampoc tenen pinzells, funcionen a causa del disseny especial del rotor. Els LED reactius distingeixen tres dels seus dissenys: un rotor estratificat transversalment, un rotor amb pols diferents i un rotor estratificat axialment. Una explicació del principi del seu treball és bastant complicada i necessitarà una gran quantitat, de manera que l’ometrem. És probable que aquests motors es trobin a la pràctica poc freqüentment. Es tracta principalment de màquines de baix consum que s’utilitzen en automatització.

Àmbit d’aplicació
Els motors síncrons són més cars que els asíncrons, a més necessiten una font addicional d’excitació de corrent directe; això redueix en part l’amplada de l’abast d’aquest tipus de màquines elèctriques. Tanmateix, els motors elèctrics síncrons s’utilitzen per impulsar mecanismes on es poden fer sobrecàrregues i cal un manteniment precís de revolucions estables.

A més, s’utilitzen més sovint en l’àmbit de grans capacitats: centenars de quilowatts i unitats de megavatios i, al mateix temps, l’arrencada i l’aturada són més aviat rares, és a dir, que les màquines funcionen tot el dia durant tot el temps. Aquesta aplicació es deu al fet que les màquines síncrones funcionen amb cos Ф phi proper a 1 i poden aportar energia reactiva a la xarxa, cosa que millora el factor de potència de la xarxa i redueix el seu consum, cosa important per a les empreses.
Avantatges i desavantatges
En paraules senzilles, qualsevol cotxe elèctric té els seus avantatges i contres. Els avantatges d’un motor sincrònic són:
- Funcionen amb cosPhI = 1, a causa de l'excitació de corrent directe, respectivament, que no consumeixen energia reactiva de la xarxa.
- Durant el funcionament, amb sobreexcitació, donen energia reactiva a la xarxa, millorant el factor de potència de la xarxa, la caiguda de tensió i les pèrdues a la mateixa i augmenta el CM dels generadors de centrals elèctriques.
- El moment màxim desenvolupat en l’eix del LED és proporcional a U, i per a l’AD-U² (dependència quadràtica de la tensió). Això significa que el LED té una bona capacitat de càrrega i estabilitat, que es conserven durant una caiguda de tensió a la xarxa.
- Com a conseqüència de tot això, la velocitat de rotació és estable durant les sobrecàrregues i subsidències, dins de la capacitat de sobrecàrrega, especialment amb un augment del corrent d’excitació.
Tanmateix, un inconvenient important d’un motor síncron és que el seu disseny és més complicat que el d’un asincrònic amb un rotor de curtcircuit; es necessita un excitador sense el qual no pot funcionar. Tot això comporta un cost més elevat en comparació amb les màquines asíncrones i amb dificultats de manteniment i funcionament.
Potser els avantatges i els inconvenients dels motors sincrònics acaben aquí. En aquest article hem intentat resumir informació general sobre motors sincrònics. Si voleu complementar el material, escriviu els comentaris.
Materials relacionats: