Què és un motor d’inducció i com funciona
El motor d’inducció és simple i fiable i és per això que s’utilitza molt sovint en la producció i en electrodomèstics, des de l’accionament de la vàlvula fins a la rotació del tambor a la rentadora. En aquest article us explicarem amb paraules senzilles sobre què són els motors elèctrics asincrònics, què és i com funciona aquest tipus de màquines elèctriques.
Vistes
Els motors d’inducció (AM) es divideixen en dos grups principals:
- rotor de gàbia d'esquirol
- amb rotor de fase.
Si omitem els matisos, la diferència és que el motor del rotor de la gàbia d'esquirol no té pinzells i bobinats pronunciats, és menys exigent en el manteniment. Mentre que en motors asincrònics amb rotor de fase hi ha tres enrotllaments connectats a anelles lliscants, el corrent dels quals es treu per raspalls. A diferència de l’anterior, és millor controlar el parell en l’eix i és més fàcil realitzar un inici suau per reduir els corrents d’introducció.
La resta de motors classifiquen:
- pel nombre de fases de subministrament: monofàsics i bifàsics (utilitzats a la vida quotidiana alimentats per una xarxa de 220V), i trifàsics (més utilitzats en producció i tallers).
- a manera de subjecció - brida o en pates
- per mode de funcionament: per a mode de llarga durada, de curta durada o de repetida durada.
I una sèrie d'altres factors que afecten l'elecció d'un determinat producte per utilitzar-lo en condicions específiques.
Es pot parlar molt dels motors elèctrics monofàsics: alguns són llançats a través d’un condensador, i alguns requereixen una capacitat d’arrencada i de treball. També hi ha opcions amb un gir de curtcircuit, que funcionen sense condensador i que s’utilitzen, per exemple, en caputxes. Si esteu interessats, escriviu els comentaris i escriurem un article al respecte.
Dispositiu
Per definició, "asíncron" es refereix a un motor de CA en què el rotor gira més lentament que el camp magnètic de l'estator, és a dir, de manera asíncrona. Però aquesta definició no és massa informativa. Per entendre-ho, heu d'esbrinar com està dissenyat aquest motor.
Un motor d’inducció, com qualsevol altre, consta de dues parts principals - rotor i estator. “Per als maniquins” en electricitat: desxifrem:
- L’estator s’anomena part fixa de qualsevol generador o motor elèctric.
- El rotor s’anomena part rotativa del motor, que condueix els mecanismes.

L’estator consta d’una carcassa, els extrems de la qual es tanquen mitjançant escuts de suport en els quals s’instal·len els coixinets. Segons el propòsit i la potència del motor, s’utilitzen coixinets corredissos o rodants. El nucli es troba al cas, hi ha instal·lat un bobinat. S'anomena bobinatge d'estator.

Ja que el corrent s’alterna per reduir les pèrdues a causa dels corrents perduts (Corrents de Foucault) El nucli de l'estator es trau de planxes primes d'acer aïllades les unes de les altres per escala i s'enllacen amb vernís.Es subministra una tensió d'alimentació als bobinatges de l'estator, el corrent que hi circula s'anomena corrent d'estator.
El nombre de bobinatges depèn del nombre de fases d’alimentació i del disseny del motor. De manera que un motor trifàsic té almenys tres enrotllaments connectats mitjançant un esquema d'estrella o triangle. El seu nombre pot ser major i afecta la velocitat de gir de l’eix, però en parlarem més endavant.
Però, amb el rotor, les coses resulten més interessants, com ja hem esmentat, pot ser de curtcircuit o de fase.

Un rotor de gàbia d'esquirol és un conjunt de varetes metàl·liques (generalment d'alumini o coure), a la figura superior s'indiquen amb el número 2, soldat o ple al nucli (1), tancat per anells (3). Aquest disseny s’assembla a una roda en què corren rosegadors domesticats, raó per la qual sovint s’anomena “gàbia d’esquirol” o “roda d’esquirol” i aquest nom no és argot, sinó força literari. Per reduir els harmònics més alts de l’EMF i la polsació del camp magnètic, les barres no es posen al llarg de l’eix, sinó a un cert angle respecte de l’eix de rotació.
El rotor de fase difereix de l'anterior ja que ja té tres bobinatges, com en un estator. Els inicis dels bobinatges es connecten a les anelles, generalment de coure, que es pressionen sobre l’eix del motor. Més endavant explicarem breument per què es necessiten.

En ambdós casos, un dels extrems de l’eix està connectat a un mecanisme accionat pel moviment, té forma cònica o cilíndrica amb o sense solcs per instal·lar una brida, una politja i altres peces d’accionament mecànic.
Un rotor, necessari per bufar i refredar, es fixa a la part "posterior" de l'eix; es col·loca una carcassa a la carcassa sobre el rotor. Així, l’aire fred es dirigeix per les vores del motor d’inducció, si aquest rotor no gira per algun motiu, s’escalfarà.

El disseny del primer motor d’inducció va ser desenvolupat per M.O. Dolivo-Dobrovolsky i el va patentar el 1889. Sense cap canvi, ha perdurat fins avui.
Principi de funcionament
Les màquines elèctriques asíncrones s’anomenen sovint inducció, això es deu al seu principi de funcionament. Qualsevol motor elèctric és impulsat a la rotació com a resultat de la interacció dels camps magnètics del rotor i estator, així com a causa de la força Ampere. Al seu torn, pot existir un camp magnètic al voltant d'un imant permanent o al voltant d'un conductor a través del qual flueix el corrent. Però, com funciona exactament una màquina asíncrona?
En un motor d’inducció, a diferència d’altres, no existeix per si mateix un bobinat d’excitació, mentre que té un camp magnètic? La resposta és senzilla: un motor d’inducció és un transformador.
Considereu el principi del seu funcionament en l'exemple d'una màquina trifàsica, ja que es troben amb més freqüència que d'altres.
A la figura següent es pot veure la ubicació dels enrotllaments al nucli estator d’un motor asíncron trifàsic.

Com a resultat del flux d’un corrent trifàsic, un bobinatge magnètic giratori apareix als bobinatges de l’estator. A causa del canvi de fase, el corrent flueix cap a un o l’altre sinuós, d’acord amb això hi ha un camp magnètic, els pols del qual estan dirigits segons la regla de la mà dreta. I d’acord amb el canvi de corrent en una o altra bobinada, els pols s’envien en la direcció corresponent. Com il·lustra la següent animació:

En el cas més senzill (de dos pols), els enrotllaments s’apilen de tal manera que cadascun d’ells es compensa amb 120 graus respecte a l’anterior, com és l’angle de fase del voltatge a la xarxa de CA.
La velocitat de rotació del camp magnètic de l'estator es diu sincrònica. Obteniu més informació sobre com gira i per què aprendreu el següent vídeo. Tingueu en compte que als motors bifàsics (condensador) i monofàsics: no és giratori, sinó el·líptic ni pulsatiu, i els bobinats no són 3, sinó 2.
Si considerem un motor asíncron amb rotor de gàbia d'esquirol, el camp magnètic de l'estator indueix una EMF a les seves varetes, ja que estan tancades, el flux de corrent.A causa d'això, també es produeix un camp magnètic.
Com a resultat de la interacció de dos camps i Amperi forçaactuant sobre el rotor, comença a girar després del camp magnètic giratori de l'estator, però sempre es troba lleugerament per darrere de la velocitat de rotació de l'estator MP, aquest retard s'anomena lliscament.
Si la velocitat de rotació del camp magnètic s’anomena síncrona, la velocitat de rotació del rotor ja és asíncrona, de la qual va rebre aquest nom.
A l’AD amb rotor de fase, les coses són semblants, tret que un reostat estigui connectat als seus anells, que després que el motor entri en la modalitat de funcionament, s’elimini del circuit i els enrotllaments siguin curtcircuitats. Això es mostra en el diagrama següent, però en lloc d’un reostat, s’utilitzen resistències constants, connectades o manejades per contactors KM3, KM2, KM1.
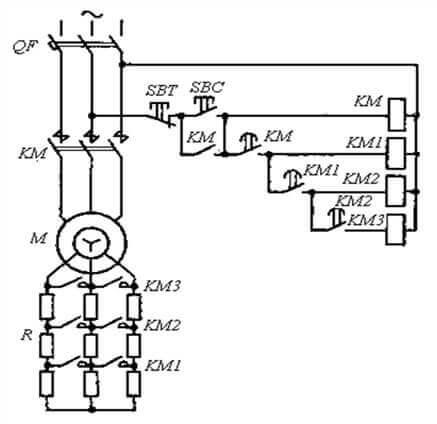
Aquest enfocament permet un bon inici i reduir els corrents d’introducció, augmentant la resistència elèctrica activa del rotor.
 Resumir:
Resumir:
- El corrent dels bobinatges de l'estator genera un camp magnètic.
- El camp magnètic condueix a corrent al rotor.
- El corrent del rotor condueix a l’aparició d’un camp al seu voltant.
- Atès que el camp de l'estator gira, a causa del seu camp, el rotor comença a girar al darrere.
Velocitat de lliscament i rotació
La freqüència de rotació del camp magnètic de l'estator (n1) és superior a la freqüència de rotació del rotor (n2). La diferència entre ells es denomina relliscada i es designa amb la lletra llatina S i es calcula mitjançant la fórmula:
S = (n1-n2) * 100% / n1
El lliscament no és un inconvenient d’aquest motor elèctric, perquè si el seu eix girava amb la mateixa freqüència que el camp magnètic de l’estator (de manera sincronitzada), llavors no s’induiria cap corrent a les seves varetes, i simplement no giraria.
Ara sobre un concepte més important: la velocitat de rotació del rotor d’un motor d’inducció. Depèn de 3 valors:
- freqüència de tensió d’alimentació (f);
- el nombre de parells de pols magnètics (p);
- relliscada (S).
El nombre de parells de pols magnètics determina la velocitat de rotació sincrònica del camp i depèn del nombre de bobinats de l'estator. El lliscament depèn de la càrrega i del disseny d’un motor elèctric determinat i es troba en un rang del 3-10%, és a dir, la velocitat asíncrona és molt lleugerament inferior a la sincrònica. Doncs bé, la freqüència del corrent altern es fixa en 50 Hz.
Per tant, la velocitat de rotació de l’eix d’un motor d’inducció és difícil de regular, només es pot afectar la freqüència de la xarxa, és a dir, ajustant un convertidor de freqüència. És possible disminuir la tensió de l'estator, però la potència de l'eix disminueix, tanmateix, s'utilitza una tècnica com aquesta en iniciar l'AM amb la commutació dels enrotllaments d'estrella a delta per reduir els corrents inicials.
La freqüència de gir del camp de l'estator (velocitat sincrònica) es determina mitjançant la fórmula:
n = 60 * f / p
Així, en un motor amb un parell de pols magnètics (dos pols), la velocitat sincrònica és:
60 * 50/1 = 3000 rpm
Les opcions més comunes per als motors elèctrics amb:
- un parell de pals (3000 rpm);
- dos (1500 rpm);
- tres (1000 rpm);
- quatre (750 rpm).
La velocitat real del rotor serà lleugerament inferior, en un motor d’inducció real s’indica a la placa indicadora, per exemple, aquí - 2730 rpm. Malgrat això, la gent trucarà a un motor així asíncron segons la velocitat síncrona o simplement "tres mil metres".

Aleshores la seva relliscada és igual a:
3000-2730*100%/3000=9%
Àmbit d’aplicació
El motor elèctric asincrònic ha trobat aplicació en tots els àmbits de l’activitat humana. Els que s’alimenten d’una fase (de 220V) es poden trobar en actuadors de baixa potència o en electrodomèstics i eines, com per exemple:
- en una rentadora del tipus "bebè" i altres models antics soviètics;
- en una formigonera;
- al ventilador;
- al capó;
- i fins i tot segadores de gespa al segment superior de preus.



En producció en xarxes trifàsiques:
- vàlvules de porta automàtiques;
- mecanismes d’elevació (grues i cabrestants);
- ventilació;
- compressors;
- Bombes
- màquines de fusteria i fusteria de metall i molt més.




L'AD també s'utilitza en vehicles elèctrics i recentment es fa publicitat activa a Internet del motor asíncron amb bobinatge de tipus Slavyanka i l'anomenada roda de motor Duyunov, que podeu trobar al vídeo del desenvolupador.
L’abast dels motors d’inducció és tan ampli que la llista només serà més llarga que aquest article, de manera que tot electricista ha de saber com està disposat, per a què serveix i on s’utilitza. Per resumir i enumerar els pros i els contres d’aquests dispositius.
Pros:
- Construcció senzilla.
- Baix cost.
- Gairebé cap manteniment.
El principal desavantatge és la dificultat per ajustar la velocitat en comparació amb els mateixos motors de corrent continu o màquines col·lectores universals. En conseqüència, és difícil organitzar una bona posada en marxa de màquines grans i, més sovint, es fa amb un convertidor de freqüència car.
Aquí acabem amb la consideració dels motors d’inducció i el seu abast. Esperem que després de llegir l'article entengueu què és i com funciona aquesta màquina elèctrica!
Materials relacionats:




