O que é um motor síncrono e onde é usado
Os motores elétricos síncronos (SD) não são tão comuns quanto os motores de gaiola de esquilo assíncronos. Mas eles são usados onde um grande torque é necessário e durante o trabalho é freqüente sobrecarga. Além disso, esse tipo de motor é usado onde é necessária grande energia para acionar os mecanismos, devido ao alto fator de potência e à capacidade de melhorar o fator de potência da rede, o que reduzirá significativamente o custo de eletricidade e carga na linha. O que é um motor síncrono, onde é usado e quais são seus prós e contras, consideraremos neste artigo.
Definição e princípio de ação
Em termos simples, um motor síncrono é chamado de motor elétrico no qual a velocidade de rotação do rotor (eixo) coincide com a velocidade de rotação do campo magnético do estator.
Vamos considerar brevemente o princípio de operação de um motor elétrico desse tipo - ele é baseado na interação de um campo magnético de estator rotativo, geralmente criado por uma corrente alternada trifásica e um campo magnético constante do rotor.
O campo magnético constante do rotor é criado pelo enrolamento de excitação ou ímãs permanentes. A corrente nos enrolamentos do estator cria um campo magnético rotativo, enquanto o rotor no modo de operação é um ímã permanente, seus pólos correm para os pólos opostos do campo magnético do estator. Como resultado, o rotor gira em sincronia com o campo do estator, que é sua principal característica.
Lembre-se que motor de indução a velocidade de rotação do estator MP e a velocidade de rotação do rotor diferem pela quantidade de escorregamento, e sua característica mecânica é "humped" com um pico durante o escorregamento crítico (abaixo de sua velocidade de rotação nominal).
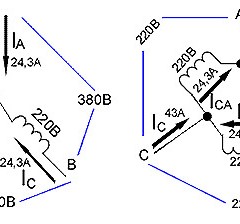
A velocidade com a qual o campo magnético do estator gira pode ser calculada usando a seguinte equação:
N = 60f / p
f é a frequência da corrente no enrolamento, Hz, p é o número de pares de polos.
Por conseguinte, a velocidade de rotação do eixo do motor síncrono é determinada pela mesma fórmula.
A maioria dos motores elétricos CA utilizados na produção é fabricada sem ímãs permanentes, mas com um enrolamento de excitação, enquanto os motores CA síncronos de baixa potência são fabricados com ímãs permanentes no rotor.
A corrente no enrolamento de campo é fornecida por anéis e um conjunto de escovas. Ao contrário de um motor elétrico de coletor, em que um coletor (um conjunto de placas dispostas longitudinalmente) é usado para transmitir corrente a uma bobina rotativa, os anéis são montados no síncrono em uma extremidade do estator.
Os excitadores de tiristores, freqüentemente chamados de "VTE" (com o nome de uma das séries de tais dispositivos de produção doméstica) são atualmente a fonte de excitação por corrente direta.Anteriormente, era utilizado o sistema de excitação gerador-motor, quando um gerador era instalado no mesmo eixo que o motor (também é um excitador), que resistores corrente aplicada ao enrolamento do campo.
O rotor de quase todos os motores CC síncronos é realizado sem um enrolamento de excitação e com ímãs permanentes, embora sejam semelhantes em princípio aos LEDs CA, eles são muito diferentes em termos de como são conectados e controlados em máquinas trifásicas clássicas.
Uma das principais características de um motor elétrico é uma característica mecânica. Ela motores síncronos perto de uma linha horizontal reta. Isso significa que a carga no eixo não afeta sua velocidade (até atingir algum valor crítico).
 motores assíncronos eb) síncronos")
Isso é conseguido precisamente devido à excitação da corrente direta; portanto, o motor elétrico síncrono mantém perfeitamente rotações constantes sob cargas variáveis, sobrecargas e quedas de tensão (até um determinado limite).
Abaixo, você vê o símbolo no diagrama da máquina síncrona.

Design do rotor
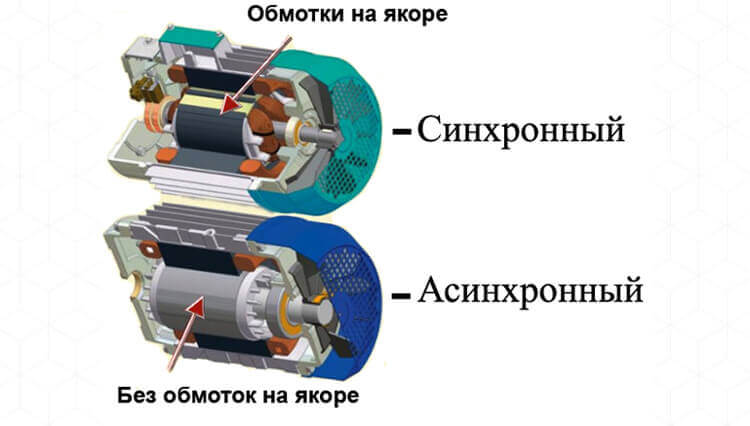
Como qualquer outro, um motor elétrico síncrono consiste em duas partes principais:
- Estator. Os enrolamentos estão localizados nele. É também chamado de âncora.
- Rotor. Ímãs permanentes ou um enrolamento de excitação são instalados nele. É também chamado de indutor, devido à sua finalidade - criar um campo magnético).
Para fornecer corrente ao enrolamento de campo, 2 anéis são instalados no rotor (uma vez que a excitação é corrente direta, “+” é fornecido a um deles e “-” ao outro). As escovas estão presas ao porta-escova.

Os rotores dos motores CA síncronos são de dois tipos, dependendo da finalidade:
- Explicitamente polar. Os pólos (bobinas) são claramente visíveis. Use em baixas velocidades e um grande número de postes.
- Implícito - parece um espaço em branco redondo, na fenda na qual os fios dos enrolamentos são colocados. Use em altas velocidades de rotação (3000, 1500 rpm) e em um pequeno número de pólos.

Partida síncrona do motor
Uma característica desse tipo de máquina elétrica é que ela não pode simplesmente ser conectada à rede e aguardar o seu lançamento. Além disso, para a operação do LED, não apenas a fonte da corrente de excitação é necessária, como também possui um circuito de partida bastante complicado.

A partida ocorre como em um motor de indução e, para criar um momento de partida, além do enrolamento de campo, um enrolamento adicional de “gaiola de esquilo” em curto-circuito é colocado no rotor. É também chamado de enrolamento "amortecedor", porque aumenta a estabilidade durante sobrecargas repentinas.
A corrente de excitação no enrolamento do rotor na partida está ausente e, quando acelera a uma velocidade sub-síncrona (3-5% menor que a síncrona), a corrente de excitação é aplicada, após a qual ela e a corrente do estator oscilam, o motor entra no sincronismo e entra no modo de operação.
Para limitar as correntes de partida de máquinas poderosas, às vezes elas reduzem a tensão nos terminais dos enrolamentos do estator, conectando um autotransformador ou resistores em série.
Enquanto a máquina síncrona inicia no modo assíncrono, os resistores são conectados ao enrolamento de campo, cuja resistência excede a resistência do próprio enrolamento em 5 a 10 vezes. Isso é necessário para que o fluxo magnético pulsante que surge sob a ação das correntes induzidas no enrolamento durante a partida não diminua a aceleração e também para não danificar os enrolamentos devido à fem induzida nele.
Visualizações
Existem muitos tipos de máquinas, e o projeto de um motor síncrono de corrente alternada com enrolamentos de excitação, como o mais comum na produção, foi descrito acima. Existem outros tipos, como:
- Motores síncronos de ímã permanente. São vários motores elétricos, como PMSM - motor síncrono de ímã permanente, BLDC - Corrente direta sem escova e outros. Diferenças entre as quais consistem no método de controle e na forma da corrente (sinusoidal ou trapezoidal). Eles também são chamados de motores sem escova ou sem escova.Usado em máquinas-ferramentas, modelos controlados por rádio, ferramentas elétricas etc. Eles não funcionam diretamente da corrente contínua, mas através de um conversor especial.
- Motores de passo - motores sem escova síncronos, nos quais o rotor mantém com precisão a posição especificada, são usados para posicionar a ferramenta de trabalho nas máquinas CNC e controlar vários elementos de sistemas automáticos (por exemplo, a posição da válvula de borboleta no carro). Eles consistem em um estator, neste caso, estão localizados enrolamentos de excitação e um rotor, feito de material magneticamente macio ou magneticamente duro. Estruturalmente muito semelhante aos tipos anteriores.
- Reativo.
- Histerese.
- Histerese reativa.
Os últimos três tipos de LED também não possuem escovas, pois funcionam devido ao design especial do rotor. Os LEDs reativos distinguem três de seus projetos: um rotor estratificado transversalmente, um rotor com polos distintos e um rotor estratificado axialmente. Uma explicação do princípio de seu trabalho é bastante complicada e exigirá uma grande quantia, portanto a omitiremos. Na prática, é provável que esses motores se encontrem com pouca frequência. Estas são principalmente máquinas de baixa potência usadas em automação.

Âmbito de aplicação
Os motores síncronos são mais caros que os assíncronos, além de exigirem uma fonte adicional de excitação por corrente contínua - isso reduz parcialmente a largura do escopo desse tipo de máquina elétrica. No entanto, motores elétricos síncronos são usados para acionar mecanismos onde são possíveis sobrecargas e é necessária a manutenção precisa de rotações estáveis.

Além disso, eles são usados com mais frequência no campo de grandes capacidades - centenas de quilowatts e unidades de megawatts e, ao mesmo tempo, iniciar e parar são bastante raros, ou seja, as máquinas funcionam 24 horas por dia. Esse aplicativo se deve ao fato de máquinas síncronas operarem com cos и phi próximo a 1 e poderem fornecer energia reativa à rede, o que melhora o fator de potência da rede e reduz seu consumo, o que é importante para as empresas.
Vantagens e desvantagens
Em palavras simples, qualquer carro elétrico tem seus prós e contras. As vantagens de um motor síncrono são:
- Trabalhe com cosPhI = 1, devido à excitação por corrente direta, respectivamente, eles não consomem energia reativa da rede.
- Durante a operação, com superexcitação, eles fornecem energia reativa à rede, melhorando o fator de potência da rede, a queda de tensão e as perdas nela, e o CM dos geradores das usinas de energia aumenta.
- O momento máximo desenvolvido no eixo do LED é proporcional a U e para o AD - U² (dependência quadrática da tensão). Isso significa que o LED possui boa capacidade de carga e estabilidade, que são preservadas durante uma queda de tensão na rede.
- Como conseqüência de tudo isso, a velocidade de rotação é estável durante sobrecargas e subsidência, dentro da capacidade de sobrecarga, especialmente com o aumento da corrente de excitação.
No entanto, uma desvantagem significativa de um motor síncrono é que seu design é mais complicado do que o de um assíncrono com um rotor em curto-circuito; é necessário um excitador, sem o qual ele não pode funcionar. Tudo isso leva a um custo mais alto comparado às máquinas assíncronas e a dificuldades em manutenção e operação.
Talvez as vantagens e desvantagens dos motores síncronos terminem aí. Neste artigo, tentamos resumir informações gerais sobre motores síncronos. Se você tem algo para complementar o material - escreva nos comentários.
Materiais relacionados: