Kāpēc nepieciešama reaktīvās jaudas kompensācija un kā tā tiek īstenota?
Definīcija
Pilna elektriskā jauda sastāv no aktīvās un reaktīvās enerģijas:
S = Q + P
Šeit Q ir reaktīvs, P ir aktīvs.
Reaktīvā jauda notiek magnētiskajā un elektriskie laukikas raksturīgas induktīvajām un kapacitatīvajām slodzēm, strādājot maiņstrāvas ķēdēs. Aktīvās slodzes darbības laikā sprieguma un strāvas fāzes ir vienādas un sakrīt. Pieslēdzot induktīvo slodzi, spriegums atpaliek no strāvas, un, kad ir kapacitīvs, tas ir priekšā.

Bīdes leņķa kosinuss starp šīm fāzēm tiek saukts par jaudas koeficientu.
cos Φ = P / S
P = S * cos Φ
Leņķa kosinuss vienmēr ir mazāks par vienotību, attiecīgi aktīvā jauda vienmēr ir mazāka par kopējo. Reaktīvā strāva plūst pretējā virzienā attiecībā pret aktīvo un neļauj tai iziet. Tā kā caur vadiem plūst pilna slodzes strāva:
S = U * I
Pat izstrādājot elektrolīniju projektus, ir jāņem vērā aktīvās un reaktīvās enerģijas patēriņš. Ja pēdējais ir par daudz, tad jums būs jāpalielina līniju šķērsgriezums, kas rada papildu izmaksas. Tāpēc viņi ar to cīnās. Reaktīvās enerģijas kompensēšana samazina tīkla noslodzi un ietaupa rūpniecības uzņēmumu enerģiju.
Kur ir svarīgi ņemt vērā kosinusa phi
Redzēsim, kur un kad nepieciešama reaktīvās jaudas kompensācija. Lai to izdarītu, jums jāanalizē tā avoti.

Primārās reaktīvās slodzes piemērs:
- elektromotori kolekcionārs un asinhroni, it īpaši, ja darba režīmā tā slodze konkrētam motoram ir maza;
- elektromehāniski izpildmehānismi (solenoīdi, vārsti, elektromagnēti);
- elektromagnētiskās komutācijas ierīces;
- transformatori, it īpaši brīvgaitā.
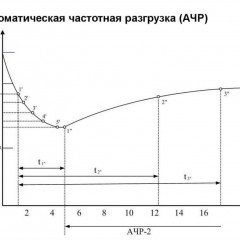
Grafiks parāda elektromotora izmaiņas cos Φ, mainoties slodzei.

Lielākās daļas rūpniecības uzņēmumu elektrisko iekārtu pamats ir elektriskā piedziņa. Līdz ar to ir liels reaktīvās enerģijas patēriņš. Privātie patērētāji nemaksā par tā patēriņu, bet uzņēmumi maksā. Tas rada papildu izmaksas no 10 līdz 30% no kopējās rēķina par elektrību.
Kompensatoru veidi un to darbības princips
Lai samazinātu reaģenta daudzumu, tiek izmantotas reaktīvās jaudas kompensācijas ierīces, tā sauktās UKRM. Kā jaudas kompensatoru praksē viņi visbiežāk izmanto:
- kondensatoru bankas;
- sinhronie motori.
Tā kā reaktīvās jaudas daudzums laika gaitā var mainīties, tas nozīmē, ka kompensatori var būt:
- Neregulēts - parasti kondensatora banka bez iespējas atvienot atsevišķus kondensatorus, lai mainītu kapacitāti.
- Automātiski - kompensācijas līmeņi mainās atkarībā no tīkla statusa.
- Dinamisks - kompensē, kad krava ātri maina savu raksturu.
Ķēde atkarībā no reaktīvās enerģijas daudzuma izmanto no viena līdz veselai kondensatoru baterijai, ko var ievietot un izņemt no ķēdes. Tad vadība var būt:
- rokasgrāmata (slēdži);
- pusautomātiski (spiedpogas ar kontaktoriem);
- nekontrolējami, tad tie ir tieši savienoti ar kravu, ieslēdzas un izslēdzas ar to.
Kondensatora akumulatorus var uzstādīt gan apakšstacijās, gan tieši pie patērētājiem, pēc tam ierīce ir savienota ar viņu kabeļiem vai strāvas kopnēm. Pēdējā gadījumā tos parasti aprēķina pēc individuāla kompensācijas par konkrēta motora vai citas ierīces reaģentu - to bieži atrod aprīkojumā elektriskos tīklos ar 0,4 kV spriegumu.

Centralizētu kompensāciju veic vai nu pie tīkla bilances sadaļas robežas, vai apakšstacijā, un to var veikt augstsprieguma tīklos ar 110 kV spriegumu. Labi ir tas, ka tas izkrauj augstsprieguma līnijas, bet slikti ir tas, ka 0,4 kV līnijas un pats transformators netiek izkrauti. Šī metode ir lētāka nekā pārējā. Tajā pašā laikā 0,4 kV zemo pusi var izkraut arī centrāli, tad UKRM tiek savienots ar autobusiem, kuriem ir pievienots transformatora sekundārais tinums, un attiecīgi tas tiek izkrauts.

Var būt arī grupas kompensācijas iespēja. Šī ir starpposma forma starp centralizēto un individuālo.
Vēl viens veids ir kompensācija ar sinhroniem motoriem, kas var kompensēt reaktīvo jaudu. Tas parādās, kad motors ir pārmērīgas ierosmes režīmā. Šādu risinājumu izmanto 6 kV un 10 kV tīklos, un tas notiek arī līdz 1000 V. Šīs metodes priekšrocība pirms kondensatoru banku uzstādīšanas ir spēja izmantot kompensatoru noderīga darba veikšanai (piemēram, jaudīgu kompresoru un sūkņu pagriešana).

Diagrammā parādīts sinhronā motora U formas raksturojums, kas atspoguļo statora strāvas atkarību no ierosmes strāvas. Zem tā jūs redzat, kam kosinuss phi ir vienāds. Kad tas ir lielāks par nulli, motoram ir kapacitatīvs raksturs, un, kad kosinuss ir mazāks par nulli, slodze ir kapacitīva un kompensē pārējo induktīvo patērētāju reaktīvo jaudu.
Secinājums
Apkopojot, uzskaitot galvenos punktus par reaktīvās enerģijas kompensāciju:
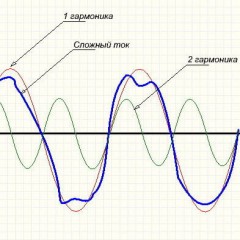
- Mērķis - uzņēmumu elektrolīniju un elektrisko tīklu izkraušana. Lai samazinātu līmeni, ierīcē var ietilpt antiresonanti tīkla harmonikas.
- Privātpersonas par to nemaksā rēķinus, bet uzņēmumi maksā.
- Kompensatorā ietilpst kondensatoru bankas vai tajā pašā nolūkā tiek izmantotas sinhronās mašīnas.
Mēs arī iesakām noskatīties noderīgus videoklipus par raksta tēmu:
Saistītie materiāli:



Pēc V.E. Kitaeva grāmatas, L.S. Shlyapintokh "Elektrotehnika ar rūpnieciskās elektronikas pamatiem" Nr. 54 1968. gada izlaiduma grāmata un 53. punkts par 1973. gada izlaidumu grāmata ir skaidri rakstīts: .... "ka maiņstrāvas ķēdē, kurā ir tikai induktivitāte, strāva atpaliek no sprieguma... .. un pirms EML pašindukcijas. To mēs varam teikt induktīvajā ķēdē spriegums ir par 90 grādiem priekšā strāvas fāzei.
Runājot par kapacitīvo iekraušanu, tā pati grāmata (nākamais rindkopa Nr. 55 par 1968. gada izlaidumu un Nr. 54 par 1973. gada izlaidumu) saka: ..."uzlādējot un izlādējot kondensatoru …. Strāva ir ceturtdaļas fāze priekšā fāzes spriegumam, t.i. 90 grādi.
Un jūs esat rakstījis pretējo ...